- Как плавают рыбы
- Содержание статьи
- Мышцы и плавники рыб: двигатель, руль и тормоза
- Способы плавания у рыб
- Как плавают рыбы? Описание, фото и видео
- Плавательный пузырь
- Как работает плавательный пузырь?
- Как плавают хрящевые рыбы?
- Форма тела, внешние покровы
- Опорно-двигательная система
- Прочие компоненты, обеспечивающие движение в водной среде
- Интересное видео о рыбах
- Передвижение рыбы — Fish locomotion
- СОДЕРЖАНИЕ
- Плавание
- Пример
- Движение тела / хвостового плавника
- Угловатая форма
- Субчаранжевая
- Carangiform
- Thunniform
- Остракиформный
- Срединный / парный движитель
- Раджиформ
- Диодонтиформ
- Amiiform
- Gymnotiform
- Балистиформ
- Колебательный
- Динамический подъем
- Гидродинамика
- Тело-хвостовой плавник
- Приспособление
- Полет
- Компромиссы
- План корпуса биплана
- План кузова моноплана
- Ходьба
- Роющий
- Личинка рыбы
- Передвижение
- Плавание
- Гидродинамика
Как плавают рыбы
Содержание статьи

Мир океанов, морей, рек и озер наполнен множеством обитателей. Рыбы относятся к большинству жителей водных глубин, но даже в их огромной семье бесчисленное количество видов. Практически все они имеют общие особенности строения, благодаря которым, плавают, точнее, очень быстро передвигаются в своей родной стихии.
Мышцы и плавники рыб: двигатель, руль и тормоза
Основную массу тела рыб составляют мышцы. Они соединяются с позвоночником и плавниками, обеспечивая их подвижность за счет сокращений. Благодаря развитой мускулатуре, рыбы могут виртуозно управлять собственным телом, вызывая волнообразные движения всего туловища или хвоста.
Плавники также соединены с мышечными волокнами и при необходимости могут сворачиваться и разворачиваться, меняя направление и скорость движения в воде. Главным двигателем рыб является хвостовой плавник, созданное природой совершенное весло, благодаря которому морские животные двигаются вперед.
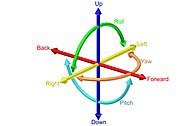
Парные грудные и брюшные плавники позволяют рыбам двигаться вверх и вниз, а спинной и подхвостовой дают возможность держаться в прямом положении и избегать поворота вокруг собственной оси.
Подхвостовые плавники служат рыбам и в качестве тормоза, а с помощью брюшных они также могут подниматься на поверхность. У плавников могут быть различные функциональные особенности, которые меняются, в зависимости от ситуации и видов рыб.
В семействе морских жителей есть множество исключений из общих правил движения. Обусловлены они разнообразием животных и их ролью в подводном мире. Именно по этой причине за ними так интересно наблюдать.
Способы плавания у рыб
Классикой является плавание морских видов: акул, сельди, марлина и скумбрии. Их тела стремительно перемещаются, двигаясь равномерно из стороны в сторону. Форель и лосось совершают быстрые маневры во время охоты, долгих заплывов вверх против течения, а также спасаясь от хищников.
Тунец совершает длинные морские переходы, благодаря чуть заметным движениям туловища, использует хвост в форме серпа в качестве руля. А угри используют для перемещений одну только мускулатуру и цепкий хвост, их плавники практически отмерли за ненадобностью.
Интересным способом двигается в воде морской конек. Его спинной плавник колеблется с удивительной быстротой. Этот плавник — единственное средство для совершения им морских прогулок и поиска пищи.
Наблюдая за плаванием рыб, можно увидеть, как разнообразен и прекрасен подводный мир, с какой фантазией и благоразумием он создан природой и подарен человеку. Оберегать этот оазис и изучать его особенности — большая и сложная задача на многие годы вперед.
Источник
Как плавают рыбы? Описание, фото и видео
Плаванье – самый древний способ передвижения живых существ. Этим способом движения владеет часть Бесхребетных, Амфибий, Рептилий, Млекопитающих, Птиц. И только представители класса Рыб вынуждены плавать все – поголовно. Ибо других шансов на передвижение в водной среде у них просто нет.
Чтобы целенаправленно передвигаться в водной среде, в процессе эволюции рыбы обзавелись целым списком приспособлений, начиная от формы тела и заканчивая органами, которые есть только у них. Сейчас мы по очереди разберем, чем Природа одарила одну из самых древних и многочисленных групп Хордовых.
Плавательный пузырь
Плавательный пузырь – основное «устройство», благодаря которому рыбы плавают. Но! Присутствует он только у костистых рыб. Поэтому сначала рассматриваем, как эксплуатируют этот орган Костистые рыбы, а потом интересуемся, каким образом передвигаются в водном пространстве Хрящевые.
Итак, плавательный пузырь – две разновеликие, полые «сосиски», разделенные перемычкой. Являются выростом пищевода. В процессе эволюции трансформировались в легкие, характерные для более развитых – амниотов, классов наземных животных.
Как работает плавательный пузырь?
Благодаря наличию плавательного пузыря рыба удерживается на нужной ей глубине. Механизм работы органа весьма прост. Вспомните закон Архимеда. Плавательный пузырь наполнен воздухом. Опускаясь ниже уровня, на котором масса рыбы совпадает с объемом вытесняемой ею воды, тело животного подвергается сжатию. Естественно, в этот момент сжатию подвергается и плавательный пузырь, из которого вытесняется воздух. Благодаря этому уменьшается объем вытесняемой рыбой воды. Баланс между весом рыбы и объемом вытесненной жидкости нарушается, что позволяет животному опуститься еще ниже.
Если рыба всплывает, то приближение к поверхности воды увеличивает количество газов, поглощаемых животным. Часть из них попадает в плавательный пузырь, расширяя его. Пузырь «распирает» тело животного, увеличивая объем вытесняемой воды. В результате этого действия удельный вес рыбы уменьшается, а ее саму буквально выталкивает на поверхность.
Итого, плавательный пузырь обеспечивает рыбе погружение, всплытие и нулевую плавучесть в режиме минимальных энергозатрат.
Как плавают хрящевые рыбы?
Типичный представитель класса хрящевых рыб – акулы. Они появились на Земле значительно раньше костистых рыб. Плавательного пузыря не имеют. Поэтому вынуждены постоянно двигаться, чтобы отрегулировать свое положение в толще воды. Даже во сне эти животные должны шевелить хвостом, иначе просто утонут, как это не парадоксально звучит по отношению к рыбам.
Форма тела, внешние покровы
Форма тела рыбы – еще одно приспособление к передвижениям в плотных, по сравнению с воздухом, водных массах. Тела животных, кроме придонных и глубоководных видов, веретенообразные, обтекаемые, которые создают минимальное сопротивление окружающей среде. Кроме того, не забываем про чешую, которая увеличивает скольжение, сокращая энергозатраты животного в процессе плаванья.
Опорно-двигательная система
Чтобы рыбы могли плавать, у них сформировалась кардинально новая – по сравнению с более древними миксинами и миногами, опорно-двигательная система. Во-первых, у рыб появились плавники. Пара грудных, брюшных. И по одному брюшному, спинному и хвостовому плавнику. Они «подвязаны» к мышцам, сокращения которых заставляет плавники изменять свое положение, генерируя движение. В результате этого животное может перемещаться в горизонтальной, вертикальной плоскости, разворачиваться.
Кроме плавников, движение поддерживается работой мышц туловища. Красные мышечные волокна задействованы в процессе длительного, монотонного плаванья. Белые мышечные волокна «включаются», когда нужен рывок, скорость, энергичное, но непродолжительное движение.
Прочие компоненты, обеспечивающие движение в водной среде
По сути, весь организм рыб приспособлен для передвижения и жизни в толще водных масс. Например, насыщение организма кислородом при помощи жабр, особенности размещения органов чувств, функционал пищеварительной, выделительной систем.
Да, и имейте в виду, обговаривая способность рыб к плаванью, следует учесть, что в водной среде именно эти животные достигли максимального уровня приспособления по сравнению с более примитивными формами. Следующим эволюционным шагом было создание организмов, которые «учились» ползать, ходить, летать. Одним из первых «мигрантов» на сушу стал Отряд Целикантовых рыб, представленный сегодня реликтовой латимерией.
Интересное видео о рыбах
Если Вы нашли ошибку, пожалуйста, выделите фрагмент текста и нажмите Ctrl+Enter.
Источник
Передвижение рыбы — Fish locomotion

Передвижение рыб — это разновидность движений животных, используемых рыбами , в основном при плавании . У разных групп рыб это достигается за счет различных механизмов движения в воде, чаще всего волнообразными движениями тела и хвоста рыбы, а у различных специализированных рыб — движениями плавников . Основные формы передвижения у рыб — угловатые, при которых волна равномерно проходит по длинному тонкому телу; sub-carangiform, у которого волна быстро нарастает по амплитуде к хвосту; панцирная форма, у которой волна сосредоточена около хвоста, который быстро колеблется; грозовидная, быстрое плавание с большим мощным серповидным хвостом; остраковидные, почти без колебаний, за исключением хвостового плавника. Более специализированные рыбы включают движение грудных плавников с в основном жестким телом, в отличие от парения спинным и анальным плавниками, как у солнечной рыбы; и движение путем распространения волны вдоль длинных плавников с неподвижным телом у рыб с электрическими органами, как у рыбы-ножа .
Кроме того, некоторые рыбы могут по-разному «ходить» (т. Е. Перемещаться по суше), зарываться в грязь и скользить по воздуху .
СОДЕРЖАНИЕ
Плавание

Рыба плавает, оказывая силу на окружающую воду. Есть исключения, но обычно это достигается за счет сокращения мышц рыбой с обеих сторон своего тела, чтобы генерировать волны сгибания, которые проходят по длине тела от носа до хвоста, обычно становясь больше по мере продвижения. В векторе силы воздействующая на воду с помощью такого движения отменить вбок, но генерировать результирующую силу назад , в свою очередь , толкает рыбу вперед через воду. Большинство рыб генерируют толчок за счет боковых движений своего тела и хвостового плавника , но многие другие виды двигаются в основном с помощью своих срединных и парных плавников. Последняя группа плавает медленно, но может быстро поворачиваться, что необходимо, например, при жизни в коралловых рифах. Но они не могут плавать так быстро, как рыбы, используя свое тело и хвостовой плавник.
Пример

В качестве примера того, как рыба движется по воде, рассмотрим тилапию, показанную на диаграмме. Как и большинство рыб, тилапия имеет обтекаемую форму тела, снижающую сопротивление воды движению и позволяющую тилапии легко прорезать воду. Его голова негибкая, что помогает ему выдерживать тягу вперед. Его чешуя перекрывается и смотрит назад, позволяя воде проходить над рыбой без ненужных препятствий. Водное трение дополнительно снижается за счет слизи, которую тилапия выделяет по всему телу.
Позвоночник гибкий, позволяя мышцам ритмично сокращаться и расслабляться, а также совершать волнообразные движения. Плавательный пузырь обеспечивает плавучесть , которая помогает рыбе регулировать его положение по вертикали в толще воды . Система боковой линии позволяет ему обнаруживать колебания и изменения давления в воде, помогая рыбе надлежащим образом реагировать на внешние события.
Хорошо развитые плавники используются для поддержания баланса, торможения и изменения направления. Грудные плавники действуют как оси, вокруг которых рыба может быстро поворачиваться и управлять собой. Парные грудные и тазовые плавники контролируют качку , а непарные спинной и анальный плавники уменьшают рыскание и крен . Хвостовой плавник обеспечивает грубую силу для продвижения рыбы вперед.
Движение тела / хвостового плавника
Выделяют пять групп, которые различаются долей тела, смещенной вбок:
Угловатая форма

В группе anguilliform, содержащей несколько длинных и тонких рыб, таких как угри , наблюдается небольшое увеличение амплитуды волны сгибания, когда она проходит вдоль тела.
Субчаранжевая
Группа подчехловидных имеет более выраженное увеличение амплитуды волн вдоль тела, при этом подавляющая часть работы выполняется задней половиной рыбы. В целом корпус рыбы более жесткий, что обеспечивает более высокую скорость, но снижает маневренность. Форель использует подкожное передвижение.
Carangiform
Группа Carangiform, названная в честь Carangidae , более жесткая и более подвижная, чем предыдущие группы. Подавляющее большинство движений сосредоточено в самой задней части тела и хвоста. У пловцов типа Каранге, как правило, быстро колеблющийся хвост.
Thunniform

Группа thunniform включает быстроходных пловцов на длинные дистанции и характерна для тунцов, а также встречается у нескольких акул-ламнид . Здесь практически все боковые движения происходят в хвосте и в области, соединяющей основное тело с хвостом (стебель). Сам хвост обычно большой и имеет форму полумесяца. Эта форма плавания позволяет этим рыбам легче преследовать и ловить добычу из-за увеличения скорости плавания, как у барракуд.
Остракиформный
Группа остракиформ не имеет заметной волны тела, когда они используют каудальное движение. Только хвостовой стабилизатор колеблется (часто очень быстро), создавая тягу . В эту группу входят Ostraciidae .
Срединный / парный движитель

Не все рыбы подходят для вышеперечисленных групп. У океанской солнечной рыбы , например, совершенно другая система, режим тетраодонтиформ, и многие мелкие рыбки используют свои грудные плавники для плавания, а также для рулевого управления и динамического подъема . Рыбы с электрическими органами, такие как у рыбы-ножа ( Gymnotiformes ), плавают, волнообразно раскачивая свои очень длинные плавники, сохраняя при этом тело неподвижным, предположительно, чтобы не нарушать создаваемое ими электрическое поле.
Многие рыбы плавают, используя сочетание двух грудных плавников или анального и спинного плавников. Различные типы движения с парными срединными плавниками могут быть достигнуты путем предпочтительного использования одной пары плавников по сравнению с другой, и включают в себя режимы rajiform, diodontiform, amiiform, gymnotiform и balistiform.
Раджиформ
Скатное движение характерно для скатов и коньков , когда толчок производится вертикальными волнами вдоль больших, хорошо развитых грудных плавников.
Диодонтиформ

Движение Diodontiform заставляет рыбу распространяться волнообразными движениями вдоль больших грудных плавников, как это было у рыбы-дикобраза ( Diodontidae ).
Amiiform
Амиевидное передвижение состоит из волнообразных движений длинного спинного плавника, в то время как ось тела остается прямой и устойчивой, как это видно на бугорке .
Gymnotiform

Передвижение Gymnotiform состоит из волн длинного анального плавника, по существу перевернутого амиевидной формы, наблюдаемого у южноамериканской рыбы-ножа Gymnotiformes .
Балистиформ
При передвижении балистиформных плавников и анальный, и спинной плавники волнообразны. Это характерно для семейства Balistidae (спинороговые рыбы). Его также можно увидеть у зейд .
Колебательный
Колебание рассматривается как плавание на основе грудных плавников и наиболее известно как подвижное движение. Движение можно описать как создание менее половины волны на плавнике, похожее на взмах крыльев птицы. Пелагические скаты, такие как манты, скаты, орлы и летучие мыши, используют колебательные движения.
Тетраодонтиформ
При передвижении тетраодонтиформ спинной и анальный плавники хлопают как единое целое, либо синхронно , либо точно напротив друг друга, как это видно у Tetraodontiformes ( самшит и иглобрюх ). В Sunfish океан отображает крайний пример этого режима.
Лабриформ
При передвижении лабриформ, наблюдаемом у губанов ( Labriformes ), колебательные движения грудных плавников основаны либо на перетаскивании, либо на подъеме. Движущая сила создается либо как реакция на сопротивление, возникающее при протаскивании плавников по воде при гребле, либо с помощью подъемных механизмов.
Динамический подъем
Костные и мышечные ткани рыб плотнее воды. Для поддержания глубины костлявые рыбы увеличивают плавучесть с помощью газового пузыря . Кроме того, для этой же цели некоторые рыбы хранят масла или липиды . Рыба без этих функций использует вместо этого динамический подъемник . Это делается с помощью грудных плавников, как у самолетов и птиц . Когда эти рыбы плавают, их грудные плавники расположены так, чтобы создавать подъемную силу, позволяющую рыбе сохранять определенную глубину. Два основных недостатка этого метода заключаются в том, что эти рыбы должны продолжать двигаться, чтобы оставаться на плаву, и что они не могут плавать назад или зависать.
Гидродинамика
Подобно аэродинамике полета, плавание с двигателем требует, чтобы животные преодолевали сопротивление, создавая тягу. Однако, в отличие от полета, плавающим животным часто не требуется прикладывать большую вертикальную силу, потому что эффект плавучести может противодействовать нисходящему притяжению силы тяжести, позволяя этим животным плавать без особых усилий. Хотя существует большое разнообразие движений рыб, плавательное поведение можно разделить на два различных «режима», основанных на структурах тела, участвующих в создании тяги: срединно-парный плавник (MPF) и тело-хвостовой плавник (BCF). Внутри каждой из этих классификаций существует множество спецификаций по спектру поведения от чисто волнового до полностью колебательного . В волнообразных режимах плавания тяга создается волнообразными движениями движущей конструкции (обычно плавника или всего тела). Колебательные режимы, с другой стороны, характеризуются тягой, создаваемой поворотом движительной конструкции в точке крепления без какого-либо волнообразного движения.
Тело-хвостовой плавник
Большинство рыб плавают, создавая волнообразные волны, которые распространяются вниз по телу через хвостовой плавник . Эта форма волнообразного передвижения называется плаванием с хвостовым плавником (BCF) на основе используемых структур тела; он включает в себя углеподобный, субчехловидный, каранжеобразный и грозообразный режимы локомоторного движения, а также колебательный остракиформный режим.
Приспособление
Подобно адаптации в полете птиц, поведение рыб при плавании можно рассматривать как баланс стабильности и маневренности. Поскольку плавание BCF зависит от более каудальных структур тела, которые могут направлять мощную тягу только назад, эта форма передвижения особенно эффективна для быстрого ускорения и непрерывного движения. Таким образом, плавание BCF является стабильным по своей природе и часто наблюдается у рыб с крупными миграционными структурами, которые должны обеспечивать максимальную эффективность в течение длительных периодов времени. С другой стороны, движущие силы при плавании в режиме MPF генерируются множеством плавников, расположенных по обе стороны тела, которые могут быть скоординированы для выполнения сложных поворотов. В результате плавание MPF хорошо приспособлено к высокой маневренности и часто встречается у более мелкой рыбы, которая требует сложных схем ухода.
Среда обитания рыб часто связана с их способностями к плаванию. На коралловых рифах более быстро плавающие виды рыб обычно обитают в подверженных волнам местообитаниях, подверженных быстрому течению воды, в то время как более медленные рыбы живут в защищенных местообитаниях с низким уровнем движения воды.
Рыбы не полагаются исключительно на один локомоторный режим, они скорее являются локомоторными универсалистами, выбирая среди множества доступных поведенческих методов и комбинируя их. Пловцы преимущественно BCF часто используют движение грудных, анальных и спинных плавников в качестве дополнительного стабилизирующего механизма на более низких скоростях, но удерживают их близко к телу на высоких скоростях, чтобы улучшить обтекаемость и уменьшить сопротивление. Было замечено, что рыбки данио изменяют свое локомоторное поведение в ответ на изменение гидродинамических воздействий на протяжении роста и созревания.
Помимо адаптации локомоторного поведения, контроль эффектов плавучести имеет решающее значение для выживания в воде, поскольку водные экосистемы сильно различаются по глубине. Рыбы обычно контролируют свою глубину, регулируя количество газа в специализированных органах, которые очень похожи на воздушные шары. Изменяя количество газа в этих плавательных пузырях , рыбы активно контролируют их плотность. Если они увеличат количество воздуха в своем плавательном пузыре, их общая плотность станет меньше, чем у окружающей воды, а повышенное восходящее давление плавучести заставит рыбу подниматься, пока они не достигнут глубины, на которой они снова будут в равновесии с окружающей водой. .
Полет
Переход от преимущественно плавательного передвижения непосредственно к полету произошел в единственном семействе морских рыб — Exocoetidae . Летучие рыбы не являются настоящими летчиками в том смысле, что они не летают на механизме. Вместо этого эти виды скользят прямо над поверхностью воды океана, даже не взмахивая «крыльями». У летучих рыб образовались аномально большие грудные плавники, которые действуют как крылья и обеспечивают подъемную силу, когда рыба вырывается из воды. Дополнительная прямая тяга и управляющие силы создаются путем погружения гипокаудальной (то есть нижней) доли их хвостового плавника в воду и очень быстрой ее вибрации, в отличие от ныряющих птиц, у которых эти силы создаются тем же двигательным модулем, который используется для движения. Из 64 существующих видов летучих рыб существует только два различных строения тела, каждый из которых оптимизирует два разных поведения.

Компромиссы
В то время как у большинства рыб хвостовые плавники имеют равные по размеру доли (т.е. гомокаудальные), у летучих рыб есть увеличенная вентральная доля (т.е. гипокаудальная), которая облегчает погружение только части хвоста обратно в воду для дополнительной тяги и управления.
Поскольку летучие рыбы — это прежде всего водные животные, их плотность тела должна быть близка к плотности воды для устойчивости плавучести. Однако это основное требование для плавания означает, что летучая рыба тяжелее (имеет большую массу), чем другие привычные летуны, что приводит к более высокой нагрузке на крыло и соотношению подъемной силы к сопротивлению у летучей рыбы по сравнению с птицей сопоставимого размера. Различия в площади крыла, размахе крыла, нагрузке на крыло и соотношении сторон были использованы для классификации летучих рыб на две отдельные классификации, основанные на этих различных аэродинамических конструкциях.
План корпуса биплана
В плане тела биплана или Cypselurus и грудные, и тазовые плавники увеличены, чтобы обеспечивать подъемную силу во время полета. У этих рыб также, как правило, более «плоские» тела, которые увеличивают общую площадь подъемной силы, что позволяет им «висеть» в воздухе лучше, чем более обтекаемые формы. В результате такой высокой подъемной силы эти рыбы являются отличными планерами и хорошо приспособлены для увеличения дальности и продолжительности полета.
Для сравнения, у летающих рыб Cypselurus меньшая нагрузка на крылья и меньшее соотношение сторон (т.е. более широкие крылья), чем у их монопланов Exocoetus , что способствует их способности летать на большие расстояния, чем рыбы с этим альтернативным строением тела. Летучие рыбы с бипланной конструкцией используют преимущества своей способности производить большую подъемную силу при запуске из воды, используя «рулежное скольжение», при котором гипокаудальная лопасть остается в воде для создания тяги даже после того, как туловище отрывается от поверхности воды, а крылья поднимаются. открывается с небольшим углом атаки для создания подъемной силы.

План кузова моноплана
В плане тела Exocoetus или моноплана только грудные плавники увеличены для обеспечения подъемной силы. Рыбы с таким строением тела, как правило, имеют более обтекаемое тело, более высокие пропорции (длинные, узкие крылья) и более высокую нагрузку на крылья, чем рыбы с двухплоскостной формой тела, что делает этих рыб хорошо приспособленными для более высоких скоростей полета. Летучие рыбы с телом-монопланом демонстрируют отличное поведение при запуске от своих собратьев-бипланов. Вместо того, чтобы увеличивать продолжительность выработки тяги, рыба-моноплан запускается из воды на высоких скоростях под большим углом атаки (иногда до 45 градусов). Таким образом, рыбы-монопланы используют преимущества своей адаптации к высокой скорости полета, в то время как рыбы с конструкцией бипланов используют свои возможности подъемной силы во время взлета.
Ходьба
«Ходячая рыба» — это рыба, которая может путешествовать по суше в течение продолжительных периодов времени. Некоторые другие случаи нестандартной рыбы локомоции включают рыба «ходьбу» вдоль морского дна , таких как handfish или Клоуновые .
Чаще всего ходячие рыбы — это амфибии . Будучи способными дольше находиться вне воды, эти рыбы могут использовать ряд средств передвижения, включая прыжки, змееподобные боковые волнообразные движения и ходьбу на треноге. В илистый прыгун , вероятно , лучшие земли приспособленной современной рыбы и способны проводить дни передвигаться из воды и может даже подняться мангры , хотя только скромных высот. Ползуновый часто конкретно упоминаются как «прогулки рыба», хотя на самом деле не «ходить», а двигается в рывках образом, поддерживая себя на вытянутых краях ее жаберные пластины и отталкиваясь своими плавниками и хвостом . В некоторых сообщениях указывается, что он также может лазить по деревьям.
Есть несколько рыб, которые не умеют ходить, например, ходячий сом . Несмотря на то, что эта рыба известна тем, что она «ходит по суше», она обычно извивается и может использовать грудные плавники для помощи в движении. У гуляющих сомов есть дыхательная система, которая позволяет им жить без воды в течение нескольких дней. Некоторые из них — инвазивные виды . Печально известный случай в Соединенных Штатах — это северный змееголов . У полиптерид рудиментарные легкие, они также могут передвигаться по суше, хотя и довольно неуклюже. Река мангровых зарослей может месяцами выживать без воды и может перемещаться в такие места, как полые бревна.

Есть некоторые виды рыб, которые могут «ходить» по морскому дну, но не по суше; одно из таких животных — это летучая морда (на самом деле она не летает, и ее не следует путать с летучей рыбой ). Летучие мыши семейства Ogcocephalidae (не путать с летучими мышами Ephippidae ) также способны ходить по морскому дну. Bathypterois grallator , также известный как «рыба-тренога», стоит на трех плавниках на дне океана и охотится за пропитанием. Африканская двоякодышащая рыба ( P. annectens ) может использовать свои плавники, чтобы «ходить» по дну аквариума, подобно тому, как земноводные и наземные позвоночные используют свои конечности на суше.
Роющий
Многие рыбы, особенно рыбы в форме угрей , такие как настоящие угри , мурены и колючие угри , способны рыться в песке или грязи. Офихтиды , змеиные угри, могут копать рыть вперед или назад.
Личинка рыбы
Передвижение
Плавание

Личинки рыб, как и многие взрослые рыбы, плавают волнообразно. Скорость плавания изменяется пропорционально размеру животных, так как более мелкие животные, как правило, плавают с меньшей скоростью, чем более крупные. Плавательный механизм контролируется режимом течения личинок. Число Рейнольдса (Re) определяются как отношение силы инерции к вязке силы . На более мелкие организмы больше влияют силы вязкости, такие как трение, и они плавают с меньшим числом Рейнольдса. Более крупные организмы используют большую долю инерционных сил, таких как давление, для плавания при более высоком числе Рейнольдса.
Личинки лучеплавниковых рыб, Actinopterygii , плавают в довольно большом диапазоне чисел Рейнольдса (Re ≈ 10–900). Это помещает их в промежуточный режим потока, в котором важную роль играют как силы инерции, так и силы вязкости. По мере увеличения размера личинок увеличивается использование сил давления для плавания при более высоких числах Рейнольдса.
Волноватые пловцы обычно сбрасывают по крайней мере два типа следа: пловцы типа Каранге сбрасывают связанные вихревые петли, а пловцы угловатой формы сбрасывают отдельные вихревые кольца. Эти вихревые кольца зависят от формы и расположения задней кромки, с которой излучаются вихри. Эти закономерности зависят от скорости плавания, отношения скорости плавания к скорости волны тела и формы волны тела.
Самопроизвольный заплыв состоит из трех фаз. Первая фаза — это фаза старта или ускорения: на этой фазе личинка имеет тенденцию вращать свое тело, чтобы сделать форму буквы «С», которая называется подготовительным ходом. Затем он толкается в противоположном направлении, чтобы выпрямить свое тело, что называется пропульсивным ударом или силовым ударом, который заставляет личинку двигаться вперед. Второй этап — циклическое плавание. В этой фазе личинка плавает примерно с постоянной скоростью. Последняя фаза — замедление. В этой фазе скорость плавания личинки постепенно замедляется до полной остановки. В подготовительном ударе личинка из-за изгиба тела создает вокруг своего тела 4 вихря, 2 из которых рассеиваются при толчковом ударе. Подобные явления можно наблюдать в фазе замедления. Однако в вихрях фазы торможения можно увидеть большую область повышенной завихренности по сравнению с начальной фазой.
Плавательные способности личинок рыб важны для выживания. Это особенно верно для личинок рыб с более высокой скоростью метаболизма и меньшего размера, что делает их более уязвимыми для хищников. Способность личинки рифовой рыбы к плаванию помогает ей поселиться на подходящем рифе и найти свой дом, поскольку она часто изолирована от своего домашнего рифа в поисках пищи. Следовательно, скорость плавания личинок рифовых рыб довольно высока (≈12 см / с — 100 см / с) по сравнению с другими личинками. Скорости плавания личинок из одних и тех же семейств в двух местах относительно схожи. Однако различия между людьми довольно велики. На уровне вида длина в значительной степени связана со способностью плавания. Однако на семейном уровне только 16% различий в способностях плавания можно объяснить длиной. Также существует отрицательная корреляция между тонкостью помола и плавательной способностью личинок рифовых рыб. Это предполагает минимизацию общего сопротивления и максимизацию объема. Личинки рифовых рыб значительно различаются по своим способностям к критической скорости плавания среди таксонов, что приводит к высокой вариабельности устойчивой скорости плавания. Это снова приводит к устойчивой изменчивости их способности изменять характер расселения, общие расстояния расселения и управлять временными и пространственными моделями расселения.
Гидродинамика
Маленькие волнообразные пловцы испытывают как силы инерции, так и силы вязкости, относительная важность которых указывается числом Рейнольдса (Re). Число Рейнольдса пропорционально размеру тела и скорости плавания. Плавательная способность личинки увеличивается через 2–5 дней после оплодотворения (dpf). По сравнению со взрослыми особями, личинки рыб испытывают относительно большую силу вязкости. Чтобы увеличить тягу до уровня взрослых, он увеличивает частоту ударов хвостом и, следовательно, амплитуду. Частота ударов хвостом увеличивается с возрастом личинок до 95 Гц через 3 дня после оплодотворения (dpf) с 80 Гц через 2 дня после оплодотворения (dpf). Эта более высокая частота приводит к более высокой скорости плавания, тем самым уменьшая хищничество и увеличивая способность ловить добычу, когда они начинают кормиться примерно через 5 дней после оплодотворения (dpf). Механика образования вихрей изменяется обратно нелинейным образом в зависимости от режима течения. Число Рейнольдса (St) рассматривается как расчетный параметр для механизма образования вихрей и может быть определено как отношение произведения частоты биений хвоста на амплитуду и средней скорости плавания. Число Рейнольдса (Re) является основным решающим критерием режима течения. В экспериментах с личинками разных типов было замечено, что медленные личинки плавают при более высоком числе Рейнольдса (St), но при более низком числе Рейнольдса (Re). Однако более быстрые личинки отчетливо плавают в противоположных условиях, то есть при меньшем числе Рейнольдса (St), но более высоком числе Рейнольдса (Re). Число Рейнольдса (St) постоянно для взрослых рыб с одинаковым диапазоном скорости. Число Рейнольдса (St) зависит не только от небольшого размера пловцов, но и от режима течения. Как и у рыб, которые плавают в вязком режиме или режиме течения с высоким коэффициентом трения, это создаст высокое сопротивление тела, что приведет к более высокому числу Рейнольдса (St). В то время как в режиме высокой вязкости взрослые особи плавают с меньшей длиной шага, что приводит к меньшей частоте ударов хвостом и меньшей амплитуде. Это приводит к увеличению тяги при таком же смещении или большей движущей силе, что единодушно снижает число Рейнольдса (Re).
Личинки рыб начинают кормиться через 5–7 дней после оплодотворения (dpf). И они испытывают крайнюю смертность (≈99%) в течение нескольких дней после начала кормления. Причина этого «критического периода» (Hjort-1914) в основном связана с гидродинамическими ограничениями. Личинки рыбы не могут есть даже при достаточном количестве встреч с добычей. Одним из основных факторов успеха кормления является размер тела личинки. Личинки меньшего размера функционируют в режиме более низкого числа Рейнольдса (Re). С возрастом размер личинок увеличивается, что приводит к более высокой скорости плавания и увеличению числа Рейнольдса. Во многих экспериментах было замечено, что число Рейнольдса успешных ударов (Re
200) намного выше, чем число Рейнольдса неудачных ударов (Re
20). Численный анализ всасывающего кормления при низком числе Рейнольдса (Re) пришел к выводу, что около 40% энергии, вложенной в открывание рта, теряется на силы трения, а не способствует ускорению жидкости по направлению ко рту. Онтогенетическое улучшение сенсорной системы, координации и переживаний не являются значимыми отношениями при определении успеха кормления личинок. Успешный удар положительно зависит от максимальной скорости потока или скорости личинок во время удара. Пиковая скорость потока также зависит от скорости раскрытия рта или скорости открытия ротовой полости для захвата пищи. По мере того как личинка стареет, размер ее тела и скорость зевки также увеличиваются, что в совокупности увеличивает успешные результаты удара. Следовательно, более крупные личинки могут схватить более быстро убегающую добычу и приложить достаточную силу, чтобы засосать более тяжелую добычу в рот.
Способность личинки-жертвы выжить при столкновении с хищником полностью зависит от ее способности чувствовать удар и уклоняться от него. Взрослые рыбы демонстрируют быстрые удары присасывающимся кормом по сравнению с личинками. Чувствительность личинок рыб к полям скорости и потока обеспечивает личинкам критическую защиту от хищников. Хотя многие жертвы используют свою визуальную систему, чтобы обнаруживать хищников и уклоняться от них при свете, добыче трудно обнаружить хищников ночью, что приводит к задержке реакции на нападение. У рыб есть механо-сенсорная система, позволяющая идентифицировать различные потоки, создаваемые различными движениями, окружающими воду и между телами, называемую системой боковой линии. Обнаружив хищника, личинка уклоняется от его удара с помощью «быстрого старта» или реакции «C». Есть и другие водные жертвы, использующие аналогичные системы, например веслоногие рачки, которые ощущают течение воды щетинками, расположенными вдоль их антенн; ракообразные используют свое механо-ощущение и как добыча, и как хищник. Плавающая рыба нарушает объем воды перед своим телом со скоростью потока, которая увеличивается по мере приближения к телу. Это конкретное явление иногда можно назвать «волной изгиба». Время начала реакции «C» влияет на вероятность ухода обратно. Вероятность побега увеличивается с удалением от хищника во время удара. В целом жертва успешно уклоняется от удара хищника с среднего расстояния (3–6 мм) от хищника. Жертва могла отреагировать еще до всасывающего кормления, обнаружив генерацию потока приближающегося хищника по реакции испуга. Своевременные маневры побега могут иметь решающее значение для выживания личинок рыб.
- Личинки разных рыб

Яйца атлантической сельди с только что вылупившейся личинкой
Источник



