- Gladius: самый доступный подводный дрон
- О продукте
- Управление
- Основные преимущества
- Комплектация
- Standard
- Advanced
- Доп.аксессуары
- О подводных дронах. Применение, управление и топ моделей.
- Назначение
- Способы управления
- Бортовое оборудование
- Глубина погружения
- Дрон для моря или озера
- Познакомимся с некоторыми моделями ROV
- Технические характеристики
- Gladius
- Характеристики
- PowerRay
- Характеристики
- Дрон-Рыбак. Размышления на тему
Gladius: самый доступный подводный дрон
О продукте
Очередной удачный стартап, который засветился на известной краудфандинговой платформе «INDIEGOGO». Разработчиком дрона выступает компания Chasing-Innovation Technology Co. Ltd. Китай. Gladius – подводный беспилотник, предназначенный для осуществления фото видеосъёмки под водой на глубине до 100 метров на протяжении 3 часов. Может оснащаться двумя вариантами камер различными по качеству съёмки это 1080P/4К (в зависимости от комплектации Standard/Advanced), обе камеры оптимизированы для съёмки под водой.
Камеры работают в тесной связи с сенсорами низкой освещенности, а сам тандем работает по специальному алгоритму обработки качества изображения. Благодаря такому подходу на выходе получается высококачественный фото и видеоматериал, реализованный под водой.

Управление
Управляется Gladius дистанционно, посредством классического раздвижного пульта в который устанавливается смартфон/планшет. Пульт имеет пару джойстиков и ряд кнопок. Тандем тесно взаимодействует с плавучем буем по Wi-Fi.
![]()
В сам буй устанавливается Wi-Fi модуль, ну а буй уже непосредственно взаимодействует с беспилотником с помощью кабеля. В зависимости от комплектации, расстояние удаления будет доступно на 50 метров, и на 500 метров (в зависимости от мощности модуля Wi-Fi).

Один из джойстиков аппаратуры управляет дроном, другой управляет камерой. С пульта так же будут доступны различные режимы работы LED-подсветки для обеспечения оптимального освещения под водой. На дисплей сопряженного устройства (смартфон/планшет) в режиме реального времени транслируется видео картинка в качестве 720P.
![]()

Глубина погружения ограничивается длинной кабеля. В зависимости от комплектации она может быть до 50 метров, и до 100 метров. Расстояние удаления ограничивается мощностью Wi-Fi передатчика, что в устанавливается в буй (доступно на 50м. и на 500м.)

Основные преимущества
- Является самым доступным подводным дроном
- Лёгок в управлении, благодаря 4 подруливающим гребным винтам, 4 степеням свободы и компактному контроллеру.
- Расстояние удаления до 500 метров с погружением до 100 метров.
- Лучшее в классе качество 4К съёмки под водой без искажений.
- В комплект входит портативный кейс весом всего 3кг (6.6lbs) с размерами 40.6 × 103.2 × 9.4см.

Внутренняя часть корпуса подводного дрона исполнена из алюминиевого сплава подверженного химическому оксидированию. Такой подход обеспечивает дрону максимальную водонепроницаемость и коррозийную стойкость.

Комплектация
Как уже упоминалось выше, производитель предлагает 2 варианта комплекта:

Standard
- Gladius дрон
- 1080P камера
- Wi-Fi Буй с 50м кабелем (для погружения)
- Модуль Wi-Fi с расстоянием удаления до 50 метров
- Раздвижной пульт управления
- Карта памяти на 16Гб
- 57Wh батарея
- Зарядное устройство
- Инструкция

Advanced
- Gladius дрон
- 4К камера
- Wi-Fi Буй с 100м кабелем (для погружения)
- Модуль Wi-Fi с расстоянием удаления до 500 метров
- Раздвижной пульт управления
- Карта памяти на 64Гб
- 57Wh батарея
- Зарядное устройство
- Инструкция
Доп.аксессуары
Так же доступны аксессуары, которые можно докупить отдельно:
- Транспортировочный кейс (умещает в себе помимо дрона все сопутствующие комплектующие)

Gladius позиционируется производителем как самый доступный подводный беспилотник для всех желающих реализовать красивую и безопасную съёмку под водой.
Источник
О подводных дронах. Применение, управление и топ моделей.
Подводный дрон – это герметичная электронно-механическая система, способная стать эффективным инструментом при исследовании морских глубин. Океанологи считают, что человечество знакомо с мировым океаном и его обитателями довольно поверхностно, а до 95% морских пространств все еще ждут своих исследователей.
В последние годы появилась целая плеяда относительно небольших необитаемых подводных аппаратов, обладающих высокой автономностью и живучестью. По-английски они именуются ROV (Remotely operated underwater vehicle). Эти машины обычно комплектуются одним или несколькими электродвигателями, системой подводного ориентирования, прожекторами и видеокамерой. Некоторые из них могут использоваться как дрон для рыбалки.
В этой статье мы предлагаем нашим читателям ознакомиться с лучшими ROV, имеющими различные возможности и предназначенными для решения довольно широкого круга задач.
Назначение
Нужно признать, что плавать с аквалангом желают далеко не все интересующиеся подводным миром. Претендент на получение сертификата подводного пловца должен обладать отменным здоровьем, уметь использовать достаточно сложное оборудование и строго придерживаться определенных правил поведения. Более того, прохождение процедуры сертификации может превратиться в утомительное и дорогое занятие. Поэтому первое, что приходит на ум – это использование ROV для подводной съемки.
Очень часто ROV выполняют мониторинг подводных сооружений и систем – трубопроводов, портовых стенок, морских буровых платформ, корпусов кораблей и т.д.
Особую привлекательность подводным машинам придает еще один вариант их использования – подводная охота и рыбалка с помощью дрона.
Таким образом, перед приобретением ROV на Алиэкспресс или другой интернет-площадке потенциальный пользователь должен определиться, что конкретно он хочет купить – беспилотник для рыбалки, дрон для подводной съёмки или что-то еще. Не последнюю роль играет и то, сколько стоит такой радиоуправляемый подводный беспилотник.
Способы управления
Разработчики ROV просто обязаны учитывать тот факт, что вода не способствует распространению радиоволн. Эта проблема имеет два решения:
- Первое заключается в том, что антенна помешается в специальный буй, плавающий на поверхности воды. Она связана с аппаратурой подводного беспилотника особым кабелем, обладающим нейтральной плавучестью. А вот для связи с оператором используется Wi-Fi. Пилот находится на берегу, в катере или в лодке и управляет машиной совершенно стандартным образом – через ПДУ, планшет или мобильный телефон.
- Второе решение значительно проще – в нем используется только длинный кабель, непосредственно связывающий пульт оператора и подводный аппарат.
Стоит добавить, что самые продвинутые модели обладают частичной автономностью и способны самостоятельно всплывать при потере связи.
Бортовое оборудование
Разумеется, на борту любого дрона имеется видеокамера и глубиномер. Все машины оснащаются мощными источниками света. На квадрокоптер для рыбалки всегда устанавливается сонар.
Глубина погружения
Как известно из курса физики, давление воды зависит от глубины погружения – каждые 10 м увеличивают этот показатель на 1 атмосферу. Пилот просто обязан контролировать этот параметр и ни в коем случае не выходить за его допустимые пределы. Если ROV погрузится слишком глубоко, давление может разрушить его корпус или повредить объектив видеокамеры.
Дрон для моря или озера
Существуют очень важные отличия между пресной и соленой водой. Подводные аппараты, рассчитанные на применение только в пресных водоемах, ни в коем случае нельзя погружать в агрессивную морскую среду.
А вы знаете какие дроны самые быстрые? Можете узнать здесь .
Познакомимся с некоторыми моделями ROV

Технические характеристики
- Габаритные размеры: 266x148x106 мм;
- Предельный вес: 1,1 кг;
- Максимальная скорость: 1,8 км/ч;
- Глубина погружения: до 65 м;
- Время работы под водой: 1,5-2 часа;
- Стоимость: US $799.
Производитель определяет свою разработку как «первый в мире бионический подводный беспилотник». У Biki нет традиционных винтов. Эта машина передвигается как обычная рыба – с помощью хвоста.
Biki движется в воде со скоростью 1,8 км/ч и движется очень тихо. Камера, входящая в комплект поставки, способна снимать 16 Mp фото и 4K видео. Полученный материал передается оператору, а также записывается на бортовую карту памяти емкостью 32 ГБ. За включение фар отвечает датчик освещения. Плавной и надежной съемке способствует встроенный стабилизатор камеры.
Что касается контроля, то на поверхности воды аппарат подключается через Wi-Fi к автономному пульту или смартфону. Такой способ связи возможен потому, что антенна, размещенная в верхнем плавнике машины, выглядывает из воды.
Погрузившись, Biki либо самостоятельно перемещается по заданному заранее маршруту, либо управление переходит к подводному пловцу, который использует водонепроницаемый пульт, поддерживающий «технологию акустической коммуникации». Дальность действия этого устройства не превышает 10 м. Видео и фото из-под воды не передаются.
Завершив задание или разрядив батарею, дрон всплывает и использует систему GPS для самостоятельного возвращения на базу.
Gladius

Характеристики
- Габариты: 430x260x95 мм;
- Вес: 3 кг;
- Глубина погружения: до 30 м;
- Максимальная скорость: 2 м/с;
- Максимальное время работы: до 4 ч;
- Провод управления: 30 или 100 м;
- Базовая стоимость: US $599.
Этот подводный аппарат признан одним из лучших в своей категории. Его камера позволяет снимать и записывать видео в формате 4K или 1080p или получать фотографии с разрешением 16 Mp. Освещением съемочной площадки занимается пара светодиодных фонарей. Более того, программное обеспечение Gladius содержит алгоритмы, способные существенно повысить качество изображения.
Gladius обладает высокой подвижностью и маневренностью. Четыре независимых электродвигателя способны перемещать эту машину в любом направлении и разгонять ее до максимальной скорости в 4 узла.
Для связи с оператором используется Wi-Fi буй, к которому дрон подключается тридцатиметровым подводным кабелем. В случае нужды, эта линия связи может быть увеличена до 100 м. Буй находится на поверхности воды и способен передавать живое видео в формате 720p на дальность до 500 метров. Для работы с беспилотником служит специальный контроллер. К нему подключается смартфон с предустановленным мобильным приложением, поддерживающим, кроме прочего, и режим FPV.
PowerRay

Характеристики
- Габаритные размеры: 465x270x126 мм;
- Вес: 3,8 кг;
- Глубина погружения: до 30 м;
- Максимальная скорость: 2 м/с;
- Скорость всплытия: 0,4 м/с;
- Скорость погружения: 0,3 м/с;
- Время работы: 4 часа;
- Провод управления: 75 или 100 м;
- Цена: € 1,699.
Этот очень интересный аппарат предназначен для ловли рыбы с квадрокоптером. Он позволяет своему владельцу не только любоваться прекрасными подводными пейзажами, но и оценить обстановку, замерить температуру воды, проверить глубину погружения и т. д. Более того, этот дрон способен помочь рыбаку поместить крючок его удочки в самое рыбное место.
Пилоту помогают встроенная подсветка, сонар и видеокамера, которая фотографирует с разрешением 12 Mpix и снимает видео в формате 4K при 25 fps. Камера поддерживает как одиночную, так и серийную съемку группами по 3 или 5 кадров.
Управление ведется по каналу Wi-Fi, причем дистанция между оператором и Wi-Fi поплавком не должна превышать 10 м. В процессе управления используется потоковое видео, которое транслируется в формате 1080p.
Источник
Дрон-Рыбак. Размышления на тему

Так уж вышло, что этот отпуск я провел на замечательном озере, далеко от крупных городов и этот опыт навёл меня на ряд мыслей, которые я собираюсь изложить в данной статье.
Дело в том, что на данном озере мне удалось неплохо порыбачить, но хотелось бы чего-то большего (инженеры мы или кто!), что позволило бы расширить возможности рыбалки — и пытливый ум принялся за работу.

Подумал я вот о чём: что если, рыбалку несколько автоматизировать и ловить рыбу непосредственно в её среде обитания, то есть, под водой? И сразу же все мысли начали склоняться к некому управляемому дрону, который позволил бы осуществлять этот процесс.
Однако, у меня сразу возникли и некие сомнения в возможности реализации этого замысла. Корнем данных сомнений является то, что мне периодически приходится проезжать мимо Кстовского района Нижегородской области, в окрестностях которого расположена система связи с подводными лодками, о которой я узнал достаточно недавно. До этого, данную систему я воспринимал всего лишь как, некое потенциально военное сооружение, которое представляет собой ряд высоченных штырей (210 метров высотой), стоящих прямо посреди поля.
Много времени спустя, совершенно случайно, мне удалось выяснить, что эта система представляет собой трофейную радиостанцию «Голиаф», захваченную во время Великой Отечественной войны, в Германии.
Почти всё время на Западе считали данную систему утерянной, и только совершенно случайно, в 90-е годы, кто-то на одной из фотографий или в газетной заметке (точно уже не помню), узнал радиостанцию, а через него — уже и весь мир.
Именно тогда, ознакомившись с особенностями устройства и его работы, я понял, что связь с устройствами, находящимися под водой не будет простой, по причине того, что вода поглощает радиосигналы – значит, необходим некий приемо-передатчик на сверхдлинных волнах, что само по себе проблемно. Чтобы осознать масштаб проблемы, обратимся к вики:
«Способность сверхдлинных волн проникать в толщу морской воды находит своё применение при организации дальней связи с подводными лодками. В СССР для этих целей на базе противолодочного самолёта Ту-142МК даже был создан специальный самолёт Ту-142МР «Орёл», оборудованный СДВ-радиостанцией Р-826ПЛ «Фрегат» с выпускной тросовой антенной длиной 8,6 км»
Именно об этом я подумал, когда пришла мысль о неком подводном дроне.
«Спортивное загугливание» на эту тему, выдало ряд результатов, готовых проектов людей:
Ознакомившись с которыми, я убедился в том, о чем подозревал изначально: передача радиосигнала под водой весьма проблемна, хотя и возможна. Именно поэтому любители предпочитают ограничиваться более проверенными решениями, а именно, — связывать пульт управления подводным дроном и сам дрон с помощью системы кабелей. По кабелям могут передаваться как сигналы управления, так и видеосигнал от камеры, находящейся на дроне. Кроме того, для облегчения веса и увеличения надежности системы в целом, аккумуляторные батареи питания могут быть расположены на берегу и питание может передаваться на дрон также по кабелю.
Так как я представлял себе дрон в виде некого «подводного охотника», который мог бы охотиться на рыбу, непосредственно наблюдая её через камеру, мне показалось, что неплохим решением будет устройство, с размещенными на нём ружьями для подводной охоты пружинного типа.
После ряда размышлений, мне пришло в голову некое устройство, подобное тому, как на рисунке:

Однако, как можно видеть, корпус устройства является достаточно проблемным в создании:
- если его делать 3D печатью — проблема получить корпус большого размера, так как потребуется 3D принтер соответствующего масштаба;
- если же, его изготовить из некого плоского материала, с помощью лазерной резки (то есть, сделать стопку пластин и потом собрать их воедино, стянув болтами), — будет достаточно проблематично герметизировать каждый слой и возникнет риск возникновения многочисленных протечек, чего очень не хотелось бы.
Ввиду всего вышесказанного, мне пришла в голову мысль, что можно ведь изготовить корпус, весьма бюджетным и надежным способом: взять обычную сантехническую трубу, например серого цвета и сечением что-то около 200 мм и закупорить её концы пробками, распечатанными с помощью 3D печати. В таком случае мы сможем получить достаточно надежный корпус, который практически гарантированно устранит риск возникновения протечек. Задумку, как этот корпус может выглядеть, можно увидеть на рисунке ниже:

Кстати говоря, данный тип устройства позволяет весьма удобно размещать внутри трубчатого корпуса различные компоненты, для этого необходимо всего лишь разместить в соответствующих местах трубы переборки, в отверстиях которых крепятся как электроника, так и силовая двигательная установка.
Но в целом, продумывая устройство дальше, мне показалась достаточно неправильной сама идея иметь длинный кабель, связанный с берегом, — так как кабель такой длины будет затруднять продвижение дрона, тянуть его ко дну.
Поэтому, мне показалось, что было бы неплохо, если бы дрон не был бы связан кабелем с берегом. Однако, как же достичь этого? Передача сигнала через воду невозможна или затруднена (по крайней мере, мы этот вариант не рассматриваем). И тут я подумал, что кабель ведь необязательно тянуть до берега! Достаточно всего лишь вывести его за пределы той зоны, в которой передача сигнала проблематична: то есть, неким образом вывести кабель из воды и превратить его в антенну! И тут просто напрашивается следующее решение: кабель выводится из дрона в некий плавающий буй, который уже связан беспроводным способом с береговым управлением.
Чтобы упростить продвижение дрона в воде и за ним не висел длинный не использующийся кабель, необходимо кабель, по мере необходимости, сматывать в катушку. Для этого вполне неплохо может подойти как некий автоматический намотчик, так и более простое механическое решение: всего лишь пружина, установленная на оси катушки, которая в свою очередь, расположена внутри этого поплавка.
Катушка достаточно легко может разматываться и так же легко сматывать вытянутый кабель. Плавучесть поплавка достаточно большая, поэтому при вытягивании кабеля из него, — поплавок не уходит под воду. При таком подходе, мы будем иметь аккуратный кабель, выпущенный наружу только на ту длину, которая необходима дрону и не более того.

Но я продолжал рассуждать дальше: чтобы осуществлять подводную охоту, у нас требующееся устройство разделено на две части, — непосредственно сам подводный дрон и поплавок. А нельзя ли как-то объединить эти устройства? И тут пришла следующая идея: а что если, мы дрон не будем помещать под воду, а выполним его в качестве некого надводного корабля, установим на него ружьё или ружья для подводной охоты, камеру видеонаблюдения и устройство беспроводной связи с берегом!
При таком подходе, мы конечно несколько теряем в возможностях, так как корабль постоянно находится на одной поверхности, то есть он не может, как подводная лодка перемещаться по всей толще воды. Однако, мы обретаем массу других преимуществ, среди которых, можно назвать объединение 2 устройств — воедино, легкая связь с берегом и отсутствие каких-либо кабелей, которые имеют тенденцию к запутыванию.
Ружья для подводной охоты вполне можно разместить и прямо на этом корабле, направив вертикально вниз:

В таком случае, всё становится предельно ясным:
1. корпус самого корабля, можно спроектировать в 3D и вывести соответствующие чертежи, согласно которым вырезать из листового материала, с применением лазерной резки,- все детали корпуса, включая переборки;
2. корабль достаточно легко сделать непотопляемым, если заполнить все неиспользованные пустоты корпуса,- пенопластом. В таком случае, даже при возникновении какого-либо рода протечек, воде просто некуда будет вливаться, так как все пустоты уже будут заполнены;

3) я сам, исторически имею предрасположенность к кораблям такого типа, так как в своё время, будучи 20-летним студентом, скачал с интернета и построил по чертежам виндсерфер, который до сих пор лежит у родителей. Возможно, как-нибудь расскажу в дальнейшем и об этом. -)

Здесь только следует сделать оговорку, что киль у корабля должен быть с закруглением в передней части, чтобы обеспечить так называемое «глиссирование»,- то есть, лёгкий выход на скольжение по поверхности воды. Благодаря этому, корабль будет двигаться достаточно легко, и преодолевать встречные волны.
Говоря о способе осуществления видеонаблюдения в процессе охоты, мне видятся следующие три варианта расположения камеры на корабле ( сразу оговорюсь, что во всех трех вариантах предполагается, что днище корабля имеет прорезь для перемещения подводного ружья).
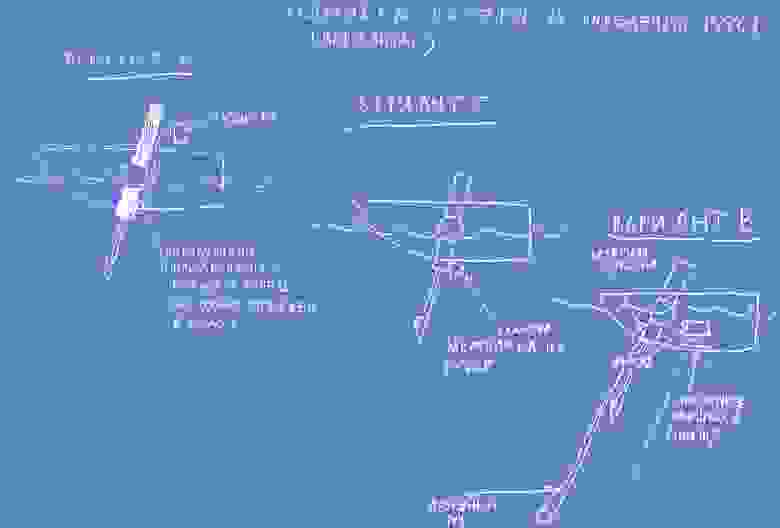
Вариант А: чтобы защитить камеру от воздействия неблагоприятного воздействия воды, в данном варианте камера располагается в защищенном месте и от камеры отводится оптоволокно, прикреплённое к стволу подводного ружья. Таким образом, при осуществлении выстрела мы смотрим максимально в ту же точку, что и ружьё, камера защищена от воды;
Вариант Б: является более проблемным, так как камера расположена прямо на самом стволе подводного ружья и находится, соответственно, под водой. Тут возникает масса вопросов по соответствующей герметизации камеры. Однако такой подход позволяет осуществлять прицеливание весьма удобным образом;
Вариант В: является как достаточно простым в реализации, так и имеющим свои нюансы в процессе эксплуатации. Основным из этих нюансов является тот, что стрелок не наблюдает цель непосредственно в прицеле. Так как камера наведена просто в прозрачное окошко, в днище корабля, прицеливание несколько затруднено.
Чтобы решить эту проблему, можно расположить на стволе подводного ружья, например, лазерную указку. Но, опять же, возникнут вопросы с соответствующей герметизацией, а также привлечением повышенного внимания к кораблю со стороны рыб, что не является положительным фактором.
Говоря же о возможных вариантах силовой установки, которая позволит кораблю передвигаться, здесь так же возможны, на мой взгляд, два варианта.
В первом варианте, в качестве силовой установки используется электрический двигатель. Подобного рода решений достаточно много, мощные образцы данного типа двигателей имеют водяное охлаждение.
Что же касается электропитания, то здесь всё стандартно — лучше всего взять литий-ионную сборку.

Во втором случае, можем использовать недостаточно недорогое решение, а также достаточно мощное (легко установить двигатель даже в 3 Квт, менее чем за 10000 рублей). В качестве такого решения может быть использован обычный бензиновый триммер для стрижки газонов. Двигатель триммера является достаточно высокооборотистым(вопрос дискуссионный, разные источники называют от 3000 — до 12000 об/мин для двухтактного двигателя) и мощным. Минусом же этого решения является его шум во время работы. Однако это решение позволяет собрать мощную систему «за недорого». А мощность в нашем случае не будет лишней – рыбу еще вытянуть надо 🙂

Как можно видеть из картинки выше, мы можем взять триммер, практически в неизменном варианте, потребуется лишь несколько видоизменить его алюминиевую штангу, а также стальной вал идущий внутри нее. То есть, нам необходимо их укоротить.
Но, бензиновый двигатель, в отличие от электрического требуется периодически заводить ( так как мы не будем его держать постоянно включенным в процессе охоты).
Для этого нам потребуется несколько видоизменить армстартер этого триммера, в простонародье — «заводилку».
В первом варианте мы устанавливаем на эту заводилку небольшой электродвигатель, который позволяет энергично намотать на связанную с ним катушку — трос заводилки и, соответственно, завести двигатель.
Во втором варианте,- мы убираем заводилку вообще и устанавливаем на вал бензинового двигателя вместо заводилки — большую шестерню, которая будет приводиться в движение с помощью маленькой шестерни на валу электродвигателя — стартера:

Обдумывая варианты, вдруг неожиданно пришла мысль: а почему собственно, необходимо обязательно устанавливать какие-то ружья? Ведь можно установить обычную удочку, со средствами отслеживания поклёвки и автоматизированной катушкой на ней, чтобы осуществлять как стравливание лески, так и её подтягивание, и подсечку в момент поклевки!

В таком случае, система еще более упрощается!
И вот, мы подошли к самому интересному : способу осуществления связи с кораблём.
Здесь, на мой взгляд, также возможен ряд вариантов:
1) можно взять полностью стандартные комплекты управления от разнообразных дронов, продающихся на али;
2) использовать самодельную двухканальную систему связи, в которой первый канал занимается передачей непосредственно видеосвязи, а второй предназначен для передачи сигналов управления. Этот способ является достаточно перспективным, в качестве его основных плюсов можно назвать высокую скорость обновления картинки, благодаря аналоговому сигналу, передающемуся на частоте 5,8 ГГерц, а также, дальнобойная система управления, позволяющая, в теории, управлять устройством на расстоянии до 1 км. В качестве данного средства управления используются известные недорогие радиомодули NRF24l01+PA+LNA.


То есть, мы получаем быструю картинку и хорошее дальнобойное управление;
3) построить свою достаточно своеобразную систему управления, основой которой являются 2 корпоративные точки доступа. Несмотря на достаточную своеобразность системы, она позволяет осуществлять высокоскоростную передачу цифрового сигнала и сигнала управления одновременно.

Эта система видится следующим образом: на берегу расположена точка доступа, к которой по беспроводному каналу подключаются ноутбуки, смартфоны и через них осуществляется управление кораблем.
Точка доступа на берегу подключена по беспроводному каналу wi-fi к такой же точке доступа, установленной на корабле. Точки связаны между собой, через соединение типа «мост».
Плюсом системы является высокоскоростная передача цифрового сигнала, а также стандартные порты rg45, которые позволяют подключать обычные видеокамеры к точке доступа. Таким образом, мы можем иметь возможность применить абсолютно стандартные камеры видеонаблюдения, имеющие высокое разрешение и специфические функции, как, например, инфракрасную подсветку, для съемки в темноте.
Кроме того, с берега можно достаточно просто обратиться к управляющему микроконтроллеру esp32, расположенному на корабле и подключенному к точке доступа через wi-fi, введя обычный IP адрес.
Минусом системы является некоторая избыточность и возможность подтормаживания видеосигнала. Именно из-за этой вероятности подтормаживания, компании производящие высокоскоростные гоночные дроны используют аналоговую передачу видеосигнала.
Да, в последнее время начинают появляться разнообразные цифровые решения для высокоскоростной передачи картинки, в частности, решение от компании DJI, однако их цена является достаточно кусачей.
В данном случае, так как в качестве управляющего микроконтроллера используется ESP32, находящийся в wi-fi сети, мы можем управлять этим микроконтроллером, запуская на нём небольшую html-страничку, используя websocket-ы для управления. То есть, эта страничка представляет собой небольшой пульт управления, который отслеживает действия пользователя,- начало его действия и окончание («нажал кнопку-едем, отжал-не едем»).
В качестве кода для прошивки esp32 можно использовать заготовку, которую я приложил ниже. Она требует доработки, но, тем не менее, вполне может быть использована (после соответствующей доработки).
Напоследок скажу, что использование небольшого судна для рыбалки может быть достаточно интересной затеей, если еще на дрон установить эхолот или же просто загрузить некий алгоритм, который позволит перемещаться судну в произвольном порядке, опускать и поднимать леску, делать подсечки и возвращаться обратно на базу, если рыба была поймана:

Ещё одним весьма любопытным вариантом применения системы является возможность создания целого флота умных кораблей, которые обмениваются между собой информацией и один из них является ретранслятором всей информации на берег. Средством дальнобойной связи является точка доступа, установленная на «корабле-матке», все остальные ведомые корабли подключаются к ней, используя стандартные возможности микроконтроллеров esp32.

Теоретически, можно для дальнобойной связи использовать только esp32 (в сети есть примеры использования этой платы для передачи данных на 10 км, но нужна будет направленная антенна). Однако, ввиду слабости ее процессора, полагаю, невозможно будет ее использовать для передачи видеосигнала высокого разрешения. Соответственно, — останется только использовать ее для управления, а видеосигнал – передавать иначе. Или же кодировать сигнал на самой камере – а esp32 использовать только для беспроводной передачи данных.
Вот такие мысли пришли мне на тему создания рыболовного дрона. Если вы хотите что-то исправить, добавить, предложить свое видение, — будет интересно почитать!
Источник



