- О подводных дронах. Применение, управление и топ моделей.
- Назначение
- Способы управления
- Бортовое оборудование
- Глубина погружения
- Дрон для моря или озера
- Познакомимся с некоторыми моделями ROV
- Технические характеристики
- Gladius
- Характеристики
- PowerRay
- Характеристики
- Gladius: самый доступный подводный дрон
- О продукте
- Управление
- Основные преимущества
- Комплектация
- Standard
- Advanced
- Доп.аксессуары
- Самодельная подводная лодка с надводной wi-fi антенной
- Как всё начиналось
- Начало работ над подлодкой и первые неудачи
- Модуль изменения плавучести
- Моторы
- Корпус
- Мозги подлодки
- Антенна
- Управление и прошивка
- Тестирование
О подводных дронах. Применение, управление и топ моделей.
Подводный дрон – это герметичная электронно-механическая система, способная стать эффективным инструментом при исследовании морских глубин. Океанологи считают, что человечество знакомо с мировым океаном и его обитателями довольно поверхностно, а до 95% морских пространств все еще ждут своих исследователей.
В последние годы появилась целая плеяда относительно небольших необитаемых подводных аппаратов, обладающих высокой автономностью и живучестью. По-английски они именуются ROV (Remotely operated underwater vehicle). Эти машины обычно комплектуются одним или несколькими электродвигателями, системой подводного ориентирования, прожекторами и видеокамерой. Некоторые из них могут использоваться как дрон для рыбалки.
В этой статье мы предлагаем нашим читателям ознакомиться с лучшими ROV, имеющими различные возможности и предназначенными для решения довольно широкого круга задач.
Назначение
Нужно признать, что плавать с аквалангом желают далеко не все интересующиеся подводным миром. Претендент на получение сертификата подводного пловца должен обладать отменным здоровьем, уметь использовать достаточно сложное оборудование и строго придерживаться определенных правил поведения. Более того, прохождение процедуры сертификации может превратиться в утомительное и дорогое занятие. Поэтому первое, что приходит на ум – это использование ROV для подводной съемки.
Очень часто ROV выполняют мониторинг подводных сооружений и систем – трубопроводов, портовых стенок, морских буровых платформ, корпусов кораблей и т.д.
Особую привлекательность подводным машинам придает еще один вариант их использования – подводная охота и рыбалка с помощью дрона.
Таким образом, перед приобретением ROV на Алиэкспресс или другой интернет-площадке потенциальный пользователь должен определиться, что конкретно он хочет купить – беспилотник для рыбалки, дрон для подводной съёмки или что-то еще. Не последнюю роль играет и то, сколько стоит такой радиоуправляемый подводный беспилотник.
Способы управления
Разработчики ROV просто обязаны учитывать тот факт, что вода не способствует распространению радиоволн. Эта проблема имеет два решения:
- Первое заключается в том, что антенна помешается в специальный буй, плавающий на поверхности воды. Она связана с аппаратурой подводного беспилотника особым кабелем, обладающим нейтральной плавучестью. А вот для связи с оператором используется Wi-Fi. Пилот находится на берегу, в катере или в лодке и управляет машиной совершенно стандартным образом – через ПДУ, планшет или мобильный телефон.
- Второе решение значительно проще – в нем используется только длинный кабель, непосредственно связывающий пульт оператора и подводный аппарат.
Стоит добавить, что самые продвинутые модели обладают частичной автономностью и способны самостоятельно всплывать при потере связи.
Бортовое оборудование
Разумеется, на борту любого дрона имеется видеокамера и глубиномер. Все машины оснащаются мощными источниками света. На квадрокоптер для рыбалки всегда устанавливается сонар.
Глубина погружения
Как известно из курса физики, давление воды зависит от глубины погружения – каждые 10 м увеличивают этот показатель на 1 атмосферу. Пилот просто обязан контролировать этот параметр и ни в коем случае не выходить за его допустимые пределы. Если ROV погрузится слишком глубоко, давление может разрушить его корпус или повредить объектив видеокамеры.
Дрон для моря или озера
Существуют очень важные отличия между пресной и соленой водой. Подводные аппараты, рассчитанные на применение только в пресных водоемах, ни в коем случае нельзя погружать в агрессивную морскую среду.
А вы знаете какие дроны самые быстрые? Можете узнать здесь .
Познакомимся с некоторыми моделями ROV

Технические характеристики
- Габаритные размеры: 266x148x106 мм;
- Предельный вес: 1,1 кг;
- Максимальная скорость: 1,8 км/ч;
- Глубина погружения: до 65 м;
- Время работы под водой: 1,5-2 часа;
- Стоимость: US $799.
Производитель определяет свою разработку как «первый в мире бионический подводный беспилотник». У Biki нет традиционных винтов. Эта машина передвигается как обычная рыба – с помощью хвоста.
Biki движется в воде со скоростью 1,8 км/ч и движется очень тихо. Камера, входящая в комплект поставки, способна снимать 16 Mp фото и 4K видео. Полученный материал передается оператору, а также записывается на бортовую карту памяти емкостью 32 ГБ. За включение фар отвечает датчик освещения. Плавной и надежной съемке способствует встроенный стабилизатор камеры.
Что касается контроля, то на поверхности воды аппарат подключается через Wi-Fi к автономному пульту или смартфону. Такой способ связи возможен потому, что антенна, размещенная в верхнем плавнике машины, выглядывает из воды.
Погрузившись, Biki либо самостоятельно перемещается по заданному заранее маршруту, либо управление переходит к подводному пловцу, который использует водонепроницаемый пульт, поддерживающий «технологию акустической коммуникации». Дальность действия этого устройства не превышает 10 м. Видео и фото из-под воды не передаются.
Завершив задание или разрядив батарею, дрон всплывает и использует систему GPS для самостоятельного возвращения на базу.
Gladius

Характеристики
- Габариты: 430x260x95 мм;
- Вес: 3 кг;
- Глубина погружения: до 30 м;
- Максимальная скорость: 2 м/с;
- Максимальное время работы: до 4 ч;
- Провод управления: 30 или 100 м;
- Базовая стоимость: US $599.
Этот подводный аппарат признан одним из лучших в своей категории. Его камера позволяет снимать и записывать видео в формате 4K или 1080p или получать фотографии с разрешением 16 Mp. Освещением съемочной площадки занимается пара светодиодных фонарей. Более того, программное обеспечение Gladius содержит алгоритмы, способные существенно повысить качество изображения.
Gladius обладает высокой подвижностью и маневренностью. Четыре независимых электродвигателя способны перемещать эту машину в любом направлении и разгонять ее до максимальной скорости в 4 узла.
Для связи с оператором используется Wi-Fi буй, к которому дрон подключается тридцатиметровым подводным кабелем. В случае нужды, эта линия связи может быть увеличена до 100 м. Буй находится на поверхности воды и способен передавать живое видео в формате 720p на дальность до 500 метров. Для работы с беспилотником служит специальный контроллер. К нему подключается смартфон с предустановленным мобильным приложением, поддерживающим, кроме прочего, и режим FPV.
PowerRay

Характеристики
- Габаритные размеры: 465x270x126 мм;
- Вес: 3,8 кг;
- Глубина погружения: до 30 м;
- Максимальная скорость: 2 м/с;
- Скорость всплытия: 0,4 м/с;
- Скорость погружения: 0,3 м/с;
- Время работы: 4 часа;
- Провод управления: 75 или 100 м;
- Цена: € 1,699.
Этот очень интересный аппарат предназначен для ловли рыбы с квадрокоптером. Он позволяет своему владельцу не только любоваться прекрасными подводными пейзажами, но и оценить обстановку, замерить температуру воды, проверить глубину погружения и т. д. Более того, этот дрон способен помочь рыбаку поместить крючок его удочки в самое рыбное место.
Пилоту помогают встроенная подсветка, сонар и видеокамера, которая фотографирует с разрешением 12 Mpix и снимает видео в формате 4K при 25 fps. Камера поддерживает как одиночную, так и серийную съемку группами по 3 или 5 кадров.
Управление ведется по каналу Wi-Fi, причем дистанция между оператором и Wi-Fi поплавком не должна превышать 10 м. В процессе управления используется потоковое видео, которое транслируется в формате 1080p.
Источник
Gladius: самый доступный подводный дрон
О продукте
Очередной удачный стартап, который засветился на известной краудфандинговой платформе «INDIEGOGO». Разработчиком дрона выступает компания Chasing-Innovation Technology Co. Ltd. Китай. Gladius – подводный беспилотник, предназначенный для осуществления фото видеосъёмки под водой на глубине до 100 метров на протяжении 3 часов. Может оснащаться двумя вариантами камер различными по качеству съёмки это 1080P/4К (в зависимости от комплектации Standard/Advanced), обе камеры оптимизированы для съёмки под водой.
Камеры работают в тесной связи с сенсорами низкой освещенности, а сам тандем работает по специальному алгоритму обработки качества изображения. Благодаря такому подходу на выходе получается высококачественный фото и видеоматериал, реализованный под водой.

Управление
Управляется Gladius дистанционно, посредством классического раздвижного пульта в который устанавливается смартфон/планшет. Пульт имеет пару джойстиков и ряд кнопок. Тандем тесно взаимодействует с плавучем буем по Wi-Fi.
![]()
В сам буй устанавливается Wi-Fi модуль, ну а буй уже непосредственно взаимодействует с беспилотником с помощью кабеля. В зависимости от комплектации, расстояние удаления будет доступно на 50 метров, и на 500 метров (в зависимости от мощности модуля Wi-Fi).

Один из джойстиков аппаратуры управляет дроном, другой управляет камерой. С пульта так же будут доступны различные режимы работы LED-подсветки для обеспечения оптимального освещения под водой. На дисплей сопряженного устройства (смартфон/планшет) в режиме реального времени транслируется видео картинка в качестве 720P.
![]()

Глубина погружения ограничивается длинной кабеля. В зависимости от комплектации она может быть до 50 метров, и до 100 метров. Расстояние удаления ограничивается мощностью Wi-Fi передатчика, что в устанавливается в буй (доступно на 50м. и на 500м.)

Основные преимущества
- Является самым доступным подводным дроном
- Лёгок в управлении, благодаря 4 подруливающим гребным винтам, 4 степеням свободы и компактному контроллеру.
- Расстояние удаления до 500 метров с погружением до 100 метров.
- Лучшее в классе качество 4К съёмки под водой без искажений.
- В комплект входит портативный кейс весом всего 3кг (6.6lbs) с размерами 40.6 × 103.2 × 9.4см.

Внутренняя часть корпуса подводного дрона исполнена из алюминиевого сплава подверженного химическому оксидированию. Такой подход обеспечивает дрону максимальную водонепроницаемость и коррозийную стойкость.

Комплектация
Как уже упоминалось выше, производитель предлагает 2 варианта комплекта:

Standard
- Gladius дрон
- 1080P камера
- Wi-Fi Буй с 50м кабелем (для погружения)
- Модуль Wi-Fi с расстоянием удаления до 50 метров
- Раздвижной пульт управления
- Карта памяти на 16Гб
- 57Wh батарея
- Зарядное устройство
- Инструкция

Advanced
- Gladius дрон
- 4К камера
- Wi-Fi Буй с 100м кабелем (для погружения)
- Модуль Wi-Fi с расстоянием удаления до 500 метров
- Раздвижной пульт управления
- Карта памяти на 64Гб
- 57Wh батарея
- Зарядное устройство
- Инструкция
Доп.аксессуары
Так же доступны аксессуары, которые можно докупить отдельно:
- Транспортировочный кейс (умещает в себе помимо дрона все сопутствующие комплектующие)

Gladius позиционируется производителем как самый доступный подводный беспилотник для всех желающих реализовать красивую и безопасную съёмку под водой.
Источник
Самодельная подводная лодка с надводной wi-fi антенной
Как всё начиналось
Всех приветствую. Я Максим и хочу поделиться информацией о том, как собирал радиоуправляемую подводную лодку без каких-либо знаний об электронике в начале своего пути.

Сам я по образованию художник анимации и компьютерной графики — программированием или электроникой никогда не занимался. У меня имелся только небольшой запас знаний о пайке, которые передал мне мой дед, когда я еще был школьником начальных классов.
Всю жизнь меня интересовала тема подводных исследований, началось всё тогда же, в детстве, с Ж.И. Кусто, а закончилось разработкой игры про подледные океаны Европы. Но, впрочем, сейчас не об этом.
Решив, что пора увлечения перевести в плоскость практики — я отправился на Youtube. Получил горсть самых базовых знаний и дальше мой путь лежал уже на AliExpress, как и у многих. Закончилось всё покупкой 27-ми наименований различных модулей и прочих компонентов.
Сотрудник почтового отделения был очень недоволен когда искал 27 посылок…
Начало работ над подлодкой и первые неудачи
Сначала я нашел человека, разбирающегося в подводных лодках не понаслышке, он помогал мне с теорией и тестами.
Далее я сразу приступил писать свой первый код для Arduino. Это был код для управления двумя двигателями подлодки. Два потенциометра: левый управляет общей мощностью двигателей, а правый поворотом подлодки (уменьшает мощность у одного из двигателей, в зависимости от положения потенциометра). Все это я выводил на недорогой дисплей, так как планировал делать отдельный пульт управления (в итоге подлодка управляется через смартфон).

Учитывая, что я еще неделю назад не знал как работают потенциометры, то восторг мой был неописуем. Не останавливаясь на достигнутом я пошел в строительный магазин и в аптеку. В строительном набрал разных полипропиленовых труб, муфт и хомутов, а в аптеке я взял несколько шприцев Жане.
Трубы, соответственно, пошли на корпус подводной лодки, а шприцы на модуль изменения плавучести. Как раз модуль изменения плавучести и оказался самой проблемной частью для меня.
Модуль изменения плавучести
Задачи у этого модуля достаточно простые, набирать воду и выдавливать её обратно по команде. И встал вопрос — как толкать поршень шприца, имея горсть сервоприводов, моторчиков и набор шестерней? Вот так точно толкать не стоит:

Это был первый опыт взаимодействия с шестернями и прочими мелочами. Кстати, я смог переделать сервопривод sg90 под вращение на 360°: сточил фиксатор на главной шестерне, который крутил потенциометр, а сам вал потенциометра приклеил в нулевом положении, чтобы случайно не вращался даже со стёсанным ограничителем.

Это всё равно не помогло решить задачу — я не смог надежно зафиксировать шестерню, взаимодействующую с зубчатой рейкой. Полученный инженерный опыт помог мне со второго раза осилить модуль изменения плавучести: я взял более мощную серву, толстую шпильку с резьбой и гайку, которую закрепил на поршне. В этот раз не стал возиться с модификацией сервопривода, решил, что проще использовать внешний драйвер и подключиться напрямую к мотору сервы.



На поршне был размещен лазерный дальномер, чтобы я мог определять в режиме реального времени — в каком он сейчас положении. Ну и опираясь на эти данные о расстоянии, я прописал блокировку поршня, когда он находится в крайних позициях. Возможно, есть и более простые методы определения положения поршня, но я случайно нашел у китайцев очень дешевый модуль — дальномер VL53L0X и решил использовать именно его. В итоге остался очень доволен, библиотека простая, работает как надо, советую. Точность в замкнутом пространстве шприца у него где-то 5мм, в принципе, мне этого было достаточно.

При тестировании возникла еще одна проблема — поршень сильно приклеивается к стенкам шприца. Не знаю с чем связано, но для старта движения поршня требуется прикладывать значительное усилие, после начального застревания дальше идет нормально. Перепробовали почти все виды смазок — многие из них сделали только хуже. Именно по этой причине пришлось добавлять алюминиевый каркас для модуля.
Моторы
С двигательной системой я остановился на самом простом решении и взял готовые подводные моторы. До этого опробовал вариант с мотором внутри корпуса. Заказал дейдвудную трубку в наборе с валом и винтами, но по мере изучения вопроса выяснилось, что для моих целей нужна целая система: сложный сальник, фланцы и т.д. Иначе будет протекать в любом случае. У меня в планах на будущее забросить подлодку куда-то на Ладогу и управлять ею через 3G сети, восседая дома на диване, а значит любые возможные протечки приведут к малой автономности аппарата.

В будущем планирую использовать только подводные моторы, скорее всего бесколлекторные. На данный момент используются вот такие, коллекторные:

Управляю ими используя ШИМ. Продавец говорит, что они на 8 метров глубины максимум, что, опять же, накладывает некоторые ограничения сразу.
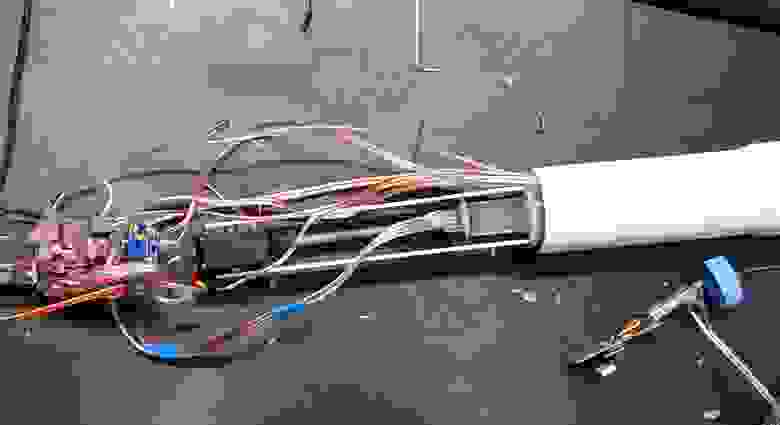
Корпус
С корпусом была интересная задача — сделать герметичное соединение, которое бы легко разбиралось. Задачу не выполнил, пришлось всё заклеивать намертво. Когда шприц набирает воду — создается давление внутри корпуса и все наши крепления просто выдавливало. В итоге все важные провода вывели на герметичный разъем, через который можно и зарядить аппарат, и прошить бортовую Arduino, и подключить антенну.
Да, антенна у нас подключается при помощи кабеля и находится в надводном положении, гарантируя надежную связь. Но об антенне чуть позже.




Корпус состоит из полипропиленовых труб 50мм и муфт. Места соединений замазаны герметичной пастой, а сверху, для прочности, залиты термоклеем. В торец вывели носик шприца, герметичный разъем, тумблер включения и два провода для прожекторов. Прожекторы закреплены на носовой затопляемой части, такая конструкция позволила сместить центр тяжести ближе к центру подлодки.
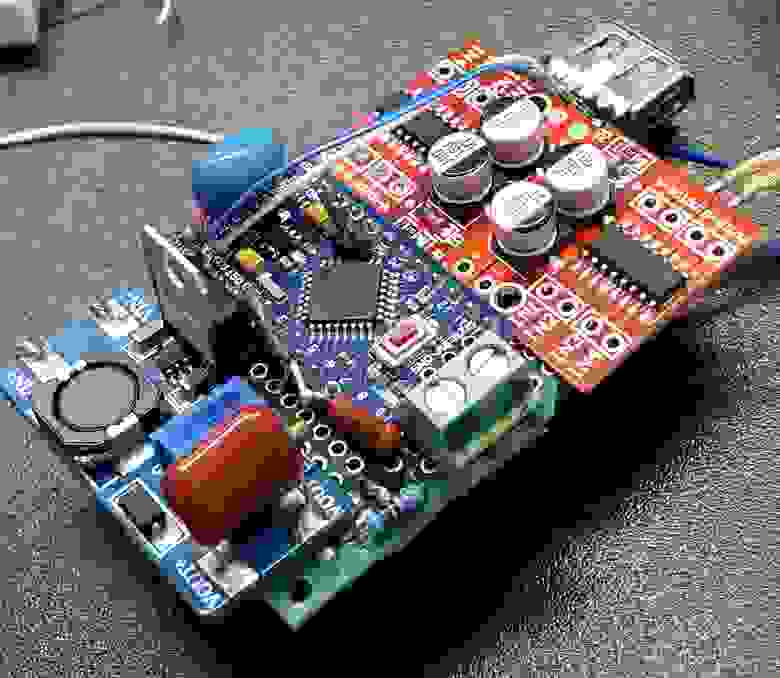
Мозги подлодки
Это самая интересная для меня часть. Когда начинал прорабатывать схему, то еще не знал как работают, например, конденсаторы и для чего они нужны. Очень радовался, когда при выключении питания — светодиод на Arduino медленно тускнел за счет ёмкого конденсатора.
На деле же они в схеме пригодились для сглаживания пиков, возникающих в цепи из-за работы коллекторных моторов. Также они нужны для подключения стабилизатора напряжения.
Аккумулятор у нас из двух ячеек, соответственно 8.4 В напряжение идет на моторы, а 5 В после стабилизатора — на Arduino и прочие датчики. Полноразмерная схема (кликабельно):

Сначала многое не получалось только по той причине, что собирал всё на макетной плате. Никак не мог понять почему не работает та или иная часть схемы. В итоге всё начал паять и положительные результаты тестов не заставили себя ждать.
Одна из интересных проблем возникла и с дальномером. Библиотека у него хорошая, но вот если установить режим точности на средний или высокий, то будет тормозиться весь скетч и управление выйдет с пингом в 2000 мс минимум. Из-за этого дальномер у нас в режиме FAST, но его точности все равно хватает для наших задач.
Следующее, с чем я столкнулся, это кабель-менеджмент. Диаметр корпуса 50 мм. Кажется, что этого много, пока не начинаешь пытаться разместить всё внутри. Я использовал прям чрезмерно жирные кабели, предназначенные для аудио, что меня сильно подвело. Хотелось именно медные, так как удобно их паять, и чтобы не переламывались, как, например, алюминиевые. В следующий раз на поиски хороших проводов уделю больше времени.


Далее сложности возникли только с антенной.
Антенна
В качестве антенны я решил использовать esp8266 и управлять подлодкой через смартфон по Wi-Fi. Только вот у китайцев есть большое разнообразие модулей на базе ESP8266, я приобрел три разных, но смог подключить и прошить только один из них — ESP-01.
В теории, если заказывать теперь, то они уже будут с нужной прошивкой. Управление осуществляется через RemoteXY, а ему нужна определенная версия прошивки для AT-команд. Проблему с поиском нужной прошивки для управления через АТ-команды удалось решить только при помощи гайда от RemoteXY. Кстати, не реклама, просто понравился интерфейс, а уже потом я нашел более удобные и проработанные конструкторы интерфейсов для всяческих IoT.
После успешной прошивки я обвешал модуль необходимыми компонентами для работы и припаял ему USB разъем для удобного присоединения. Интегрировал ответную часть USB в пробку из под обычной бутылки и получилась простая проводная антенна с возможностью смены корпуса (замена бутылки).

Были и еще проблемы, помимо прошивки.
Плата ESP-01 должна работать от 3.3 В, а не от 5 В. Причем как логика, так и питание. Если логику я настроил через преобразователь уровня, то вот с питанием уже было лень возиться и я просто приклеил маленького ребенка радиатора на чип. От пяти вольт нормально работает, но очень сильно греется. Радиаторчик в итоге помогает не спалить чип.
Еще из проблем — я подобрал идеальный кабель для герметичного разъема, но он всего на 2 пина с экранированием, тогда как для антенны нужно 4 (питание и RX и TX для связи между антенной и Arduino на борту).
Выяснилось, что просто отдельно запитать нашу антенну не получится, так как для работы ESP+Arduino нужно обязательно иметь общую землю. Пришлось использовать экранирование в качестве земли у кабеля, а в саму антенну добавлять отдельный аккумулятор. Неудобно, но работает. Проще, конечно, найти кабель на 4 жилы и питать антенну аккумуляторами с подлодки.

На фото удачное совпадение диаметров кабеля, силиконовой трубки и обжимного отверстия у герметичного разъема.
Управление и прошивка
Управление осуществляется через интерфейс со смартфона. Интерфейс составил из готовых модулей прямо на сайте, получил исходный код интерфейса, а дальше осталось просто привязать различные элементы интерфейса к действиям внутри прошивки.
Перед получением исходного кода интерфейса, нужно указать в настройках тип модуля беспроводной связи, с которым будет взаимодействовать Arduino. Прошиваем только саму Arduino — с Wi-Fi модулем дальше общение идет автоматическое через AT-команды. Создается точка доступа, подключаетесь к ней со смартфона и управляете через заранее установленное приложение. Интерфейс приходит от Arduino, он зашит в прошивку и распознается уже самим приложением в смартфоне.
Это был мой самый первый код, я прямо тут его оставлять не буду, поскольку там используются только базовые навыки программирования и базовая математика. Были и сложные для меня моменты — я никак не смог с первого раза сделать обычную логическую операцию — чтобы сервопривод шприца при определенных значениях блокировался на движение в одну сторону.
Например, когда доходит до максимального набора воды — поршень должен остановиться на движение назад, но не должен блокироваться на движение вперед. И наоборот, когда вся вода выдавлена, поршень должен не идти вперед, но без проблем выполнять команды на обратный ход.
Вот такая логическая конструкция в итоге, где RemoteXY.button_# это кнопки в интерфейсе для погружения или всплытия.
Также, из сложного для меня в коде это фильтр значений дальномера (взял один из самых простейших в сети), ну и настройка значений для вольтметра. Фильтр был нужен из-за вышеупомянутого режима FAST у дальномера, входящие значения сильно прыгали и фильтр как раз помог с этим справиться. А вот вольтметр пригодился для индикации разряда аккумуляторов. На Arduino есть референсный пин, и если на него подавать не больше 1.1 вольт, то Arduino сможет достаточно точно определять подаваемое напряжение на этот пин. 8.4 В после делителя напряжения конвертируем в 1.1 В. И вот эта конвертация получилась неточная, пришлось опытным путем править значение напряжения, добавляя переменную в прошивку.
Тестирование
Тестирование проводили на заброшенном карьере с относительно чистой водой. Для тестов нужно было закрепить камеру и настроить подлодке дифферент (вместе с базовой нейтральной плавучестью).
Первую задачу решили просто установкой нужного винта под крепление камеры. Чтобы избежать вращений камеры — добавили немного пластилина.

Дифферент правили мешочком, который оказалось удобно зацеплять за хомут, а уже хомут можно легко перемещать вдоль подлодки. Количеством гаек в мешочке мы настроили нейтральную плавучесть, а дальше уже быстро подобрали положения хомута, чтобы подлодка не клевала носом. Решение о таком варианте было принято уже перед самой поездкой на карьер, просто напросто не оставалось времени сделать автоматическую систему правки дифферента. Её, в теории, очень легко сделать перемещением груза по резьбовой шпильке. В следующей подлодке опробую именно такой вариант. Вот, пожалуй, и вся подлодка.
Я записал два видеоролика, где более подробно рассказываю о сборке и показываю кадры, которые удалось снять под водой. Приятного просмотра :
Источник



