ILoveDiving.ru
Cайт посвящен дайвингу и погружениям в России. Наша цель — создание интересного и полезного ресурса про подводный мир и его исследование.
Способы подводной связи
Средства подводной связи играют почти столь же важную роль в создании водолазу безопасных условий работы и повышении ее эффективности, как и система жизнеобеспечения.
Достаточно падежная и в то же время обеспечивающая приемлемую разборчивость речи аппаратура подводной связи для шлангового водолазного снаряжения и автономных аппаратов была создана лишь в течение последних лет. Сколь успешно ни развивалась бы разработка систем подводного жизнеобеспечения, водолаз никогда не сможет эффективно выполнять порученную ему работу, если ему не будет гарантирована голосовая связь как с другими водолазами, так и с надводной станцией.
К сожалению, аппаратура подводной связи ведет себя также ненадежно, как и погода. Постоянно раздается много жалоб на различные трудности, и все пользующиеся такой аппаратурой единодушно соглашаются, что она далека от совершенства. Однако это не меняет сути дела — основные трудности остаются неразрешенными. На симпозиуме, состоявшемся в лаборатории ло исследованию средств связи Флоридского университета, были выяснены некоторые из причин создавшегося в этом вопросе тупика.
Хотя такая точка зрения разделяется еще далеко не всеми, беремся утверждать, что разработка надежных средств связи для аквалангистов и водолазов в шланговых костюмах сопряжена с одними и теми же трудностями. Чтобы убедиться в этом, достаточно хотя бы в общих чертах рассмотреть типичную систему подводной связи.
Система состоит из трех главных звеньев: датчика, преобразующего речь водолаза в соответствующие электрические сигналы; системы передачи этих сигналов к приемному устройству; приемника, преобразующего принятые сигналы в доступную для человеческого восприятия форму. Сложность создания соответствующих устройств для каждого из этих звеньев непосредственно зависит от того, насколько тесно функционирование данного звена связано с физиологическими особенностями-человеческого организма. Если расположить все эти звенья в порядке важности обеспечения надежности их функционирования и сопряженных с этим трудностей, то на первое место следует поставить датчик сигналов, затем приемное устройство и наконец систему передачи сигналов.
Система передачи сигналов — как обычная телефонная связь, так и сложнейшие системы связи — совершенно не зависит от последствий воздействия подводной среды на человеческий организм. Система передачи может рассматриваться как чисто техническая проблема, которая в настоящее время уже удовлетворительно решена несколькими способами.
Проводная связь. В шланговых водолазных аппаратах передача сигналов- осуществляется водонепроницаемым телефонным кабелем и усилителем звуковых частот. Системы характеризуются различной степенью сложности: к ним относятся и двухжильный телефонный кабель с одиночным усилителем, одновременно обеспечивающий возможность переговоров лишь
В одном направлении, и более сложные комплексы, позволяющие вести переговоры одновременно с несколькими водолазами.
Одна из основных причин, обусловливающих неудовлетворительное функционирование систем подводной проводной связи, заключается в том, что такие системы зачастую проектируются не как единое целое. Создание соответствующих электрических и электронных устройств не представляет особой сложности, и надежность системы связи определяется в первую очередь тем, в какой степени при ее проектировании было учтено воздействие окружающей среды. Элементы системы должны отличаться исключительной прочностью, противостоять воздействию механических нагрузок, выдерживать заливание водой, быть нечувствительными к загрязнению и коррозии.
Системы связи, предназначенные для использования с глубоководными комплексами, основаны на тех же принципах, однако в их состав входит значительно большее количество отдельных станций, необходимых для объединения всей системы. Система связи, используемая в глубоководном водолазном аппарате МК-1, применяемом в американских ВМС, была спроектирована и изготовлена фирмой «Аквасоникс» (Сан-Диего). Система состоит из следующих основных элементов: главного пульта, на котором установлена аппаратура контроля и управления всей системой; динамиков, средств регулирования громкости динамиков в декомпрессионной камере и палубного динамика; регуляторов мощности сигналов, поступающих от микрофонов; четырех 6-ваттных усилителей мощности; источника питания; двух комплектов головных телефонов и микрофонов, изолированных от воздействия посторонних шумов; входных и выходных разъемов для различных динамиков, микрофонов и других устройств; соединительного кабеля.
На пульте связи, установленном в транспортной камере (ТК) •для доставки водолазов на глубину, размещены микрофон, динамик внутренней связи, устройство для включения резервной акустической системы, различные выключатели, регуляторы громкости, штепсельные гнезда для подключения головных те—лефонов и микрофонов. В конструкцию пультов связи в палубной декомпрессионной камере (ПДК) и шлюзовом отсеке (ШО) входят контрольный микрофон, динамик внутренней связи, два изолированных от воздействия посторонних шумов микрофона, два головных телефона и соответствующие штепсельные разъемы.
Вся аппаратура рассчитана на эксплуатацию в диапазоне температур от 0 до 50° С при относительной влажности 100% Устройства, установленные в ТК, ПДК и ШО, могут работать при давлении окружающей среды до 31,6 атм.
Беспроводная связь. Существует много типов систем подводной беспроводной связи. В настоящее время чаще всего применяются системы гидроакустической и электромагнитной связи, связи с использованием электрического поля, амплитудно-моду-лированной и частотно-модулированной связи и передачи на боковой полосе частот.
Акустическая связь. Простейший способ беспроводной связи — непосредственная передача голоса под водой. Он основан на усилении человеческого голоса и излучении звуковых колебаний в воду с помощью соответствующего преобразователя. В воде максимальная дальность такой связи в идеальных условиях не превышает 100—200 м. Надежная связь с помощью этого метода осложняется наличием подводных шумов и, кроме того, во многом зависит от способности водолаза воспринимать и различать звуковые сигналы. Как уже отмечалось в гл. I, чувствительность органов слуха в воде сильно ухудшается, а обычно надеваемый на голову шлем из неопреновой резины, являющийся частью мокрого гидрокостюма, еще более уменьшает силу звука. Все это резко снижает эффективность акустической системы связи. Однако она отличается простотой конструкции и дешевизной и в силу этого находит некоторое применение в водолазном деле.
Системы связи на основе электромагнитного излучения. Электромагнитное излучение, или низкочастотные радиоволны, в настоящее время используется для связи как пбд водой, так и вблизи ее поверхности. Недостаток этого метода связи заключается в том, что вода поглощает значительную часть энергии в данном диапазоне частот. Подобный вид связи может с успехом применяться водолазами, находящимися на поверхности, однако он не позволяет удовлетворительно решить проблему подводной связи.
Системы связи с использованием электрического поля. В свое время были сделаны попытки использовать электрическое поле в качестве передающей среды для систем подводной связи. Принцип передачи основан на создании электрического поля, обычно между двумя пластинами, путем усиления человеческого голоса и образования разности потенциалов между этими пластинами. Генерируемое таким образом электрическое поле воспринимается соответствующим приемным устройством. Подобный метод обеспечивает получение совершенно свободного от помех канала связи при условии, что поблизости не располагается какое-либо другое электрическое или электронное оборудование, генерирующее мощные электрические поля. Вполне понятно, что дальность действия такой системы определяется мощностью передатчика и чувствительностью приемника. Однако с увеличением мощности водолаз начинает ощущать наличие электрического поля как удар тока средней силы.
В связи с отсутствием достаточно точных данных относительно воздействия электрических полей на водолаза система не нашла широкого применения. В настоящее время разрабатываются новые методы подводной связи с использованием электрических полей, и вполне возможно, что в течение ближайших лет этот метод позволит создать безопасную и удобную систему подводной связи.
Гидроакустическая связь с модулированием несущей частоты. Наиболее удачные из разработанных на сегодняшний день систем подводной связи основаны на использовании амплитудно- или частотно-модулированной несущей частоты. Подобные системы могут передавать человеческую речь с такой же точностью, как и линия телефонной связи. Тип системы определяется конкретными условиями ее применения^. Ограничивающими факторами являются шум окружающей среды в районе использования аппаратуры и требуемая дальность связи.
К наиболее активным источникам подводного шума относятся различные морские животные, в первую очередь двухстворчатые моллюски. Если водолазам предстоит работа вблизи свай, густо заселенных подобными моллюсками, несущая частота должна быть достаточно высокой, чтобы исключить влияние основной части этого фонового шума. Оптимальной в данном случае является частота 40 кГц. Типичным образцом аппаратуры связи этого типа может служить система Аквасоникс-420, в которой применена амплитудная модуляция несущей частоты. Дальность связи между водолазами в обычных условиях составляет около 145 м, а в открытом море, где уровень постороннего шума ниже, достигает 450 м.
Гидроакустическая связь с передачей на боковой полосе частот. В случае необходимости обеспечивать связь на сравнительно большое расстояние следует использовать более низкие частоты, отличающиеся лучшими характеристиками пропускания. Наиболее широко применяются частоты -в диапазоне 8—11 кГц, на использовании которых основаны системы подводной связи между кораблями ВМС. Аппаратура для передачи на боковой полосе частот такого диапазона позволяет водолазам поддерживать связь между собой на расстоянии до 1370 м, причем небольшие размеры аппаратуры не ограничивают свободы действий аквалангистов. Типичным образцом оборудования подобного рода является система Хай-дро продактз-811, основанная на передаче боковой полосы с подавлением несущей и работающая на фиксированной частоте 8,0875 кГц. Минимальная дальность связи с помощью такой системы составляет 900 м, в открытом море она превышает 1400 м. Предусмотрена возможность использования этой системы в небольших подводных лабораториях, а в настоящее время она широко применяется в качестве системы аварийной резервной связи в водолазных камерах.
Техника освоения морских глубин. Пер. с англ. Л., “Судостроение”
Дж.Кенни.
Источник
Виды связи под водой
Подводная лодка должна иметь каналы связи со всеми взаимодействующими объектами и структурами — с береговыми командными пунктами, с другими надводными и подводными средствами, с летательными аппаратами, а также с орбитальными объектами. Основным требованием при этом является обеспечение устойчивой связи в любой заданной точке, в любое время, в любых условиях и в любой обстановке, в т.ч. в состоянии погружения при движении с различными скоростями и маневрами, при этом с минимальным риском быть обнаруженной противником.
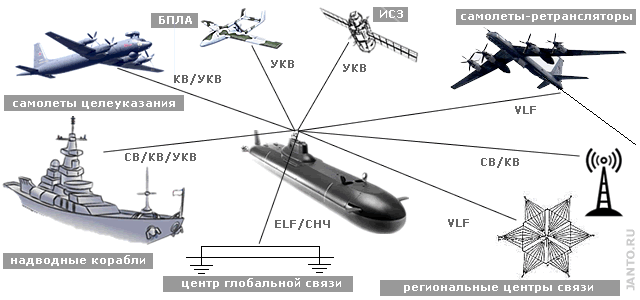
Рис.1.1. Каналы радиосвязи подводной лодки
Последнее требование является определяющим, поскольку скрытность является главным параметром и достоинством подводных лодок. Скрытность, в свою очередь, прямо связана с глубиной погружения, а последняя прямо влияет на доступность тех или иных каналов связи. Принципиальным при этом является пригодность частотных диапазонов каналов для связи через толщу воды. По этому критерию все диапазоны, используемые для связи с подводными лодками, можно разделить на три категории:
- диапазоны, не пригодные для связи с расположением антенн под водой;
- диапазоны, пригодные для связи с расположением антенн в приповерхностном слое;
- диапазоны, пригодные для связи с расположением антенн на большой глубине.
К первой категории относятся «классические» связные диапазоны средних, коротких и ультракортких волн СВ/КВ/УКВ, ко второй категории — диапазон очень низких частот VLF, к третьей — экзотические диапазоны сверхнизких и крайне низких частот ELF/СНЧ и ELF/КНЧ. Далее рассмотрим принципиальные особенности организации радиообмена в диапазонах данных категорий.
1.2. ДИАПАЗОНЫ СВ/КВ/УКВ
Данные диапазоны являются традиционными диапазонами морской подвижной службы, однако, как было упомянуто выше, антенны в этих диапазонах при проведении радиосвязи принципиально не могут находиться под водой. В то же время, в связи с ограниченностью возможностей диапазонов VLF и ELF (низкая пропускная способность каналов связи, высокий уровень атмосферных, бортовых и вибрационных помех, а также односторонний характер радиообмена), эти диапазоны принципиально необходимы для ведения подводной лодкой радиопередач в направлении береговых КП и взаимодействующих объектов, для скоростного радиоприема, а также для двухстороннего радиообмена в широкополосных радиосетях с доступом к данным оперативно-тактической обстановки.
Поскольку связь из надводного положения полностью демаскирует подводную лодку, в этих диапазонах используются специальные решения, позволяющие вести радиообмен при полном или частичном погружении за счет расположения приемно-передающих антенн над водой с меньшим риском обнаружения подводной лодки, в т.ч.:
# Связь из перископного положения с помощью антенн, выступающих над водой за счет расположения их на рубке и/или использования выдвижных конструкций. В перископном положении вероятность обнаружения подводной лодки визуальными, радиолокационными и спутниковыми средствами противника достаточно велика, поэтому длительность сеансов связи должна быть минимально возможной.
# Связь из подводного положения с использовнием ВБАУ — выпускнового, буксируемого по поверхности, антенного устройства. Вероятность обнаружения подводной лодки при этом сохраняется, т.к. буксируемое устройство тоже может быть обнаружено и по его координатам и движению могут быть определены координаты подводной лодки. Поэтому устройство выпускается на поверхность только на минимально-необходимое для сеанса связи время. Кроме того, данное решение имеет ограничения, связанные со скоростью движения подводной лодки и ее маневрами. Данное устройство может быть конструктивно совмещено с ВБАУ параванного типа, предназначенного для приема в диапазоне VLF (см. ниже).
# Связь из подводного положения с помощью ВБАУ на основе плавающего кабеля, в плавающий по поверхности конец которого вмонтированы согласующие устройства и антенны высокочастотных диапазонов. Данное решение используется, преимущественно, в диапазонах спутниковой связи. Оно обладает бОльшей скрытностью и может работать с бОльших глубин в более широком диапазоне скоростей и маневров, чем ВБАУ параванного типа, а также может быть совмещено с кабельной плавающей антенной диапазонов VLF и ELF.
# Связь из подводного положения с помощью выпускных информационных устройств ВИУ — автономных всплывающих радиобуев, в т.ч. с запрограммированным сообщением в случае одностороннего радиообмена или с промежуточным каналом акустической или оптической связи с подводной лодкой в случае двухстороннего радиообмена. Глубина погружения подводной лодки, ее скорость и маневры при этом почти не ограничены. Такие радиобуи тоже могут быть обнаружены, но определение координат и параметров движения подводной лодки при этом затруднено. Недостатком данного решения является то, что буи являются невозвращаемыми, что требует наличия на борту их пополняемого запаса, а также их ликвидации или затопления по окончании сеанса связи.
Во всех рассмотренных вариантах подводная лодка может быть обнаружена по сигналам ее передатчиков и ее координаты могут быть определены с помощью радиопеленгации. Поэтому важнейшей задачей в этих диапазонах является сокращение времени передачи со стороны подводной лодки, для чего используются как технические, так и организационные методы. Для затруднения радиопеленгации также могут использоваться и специальные виды излучений, например, скачкообразное изменение частоты, шумоподобная модуляция и т.д.
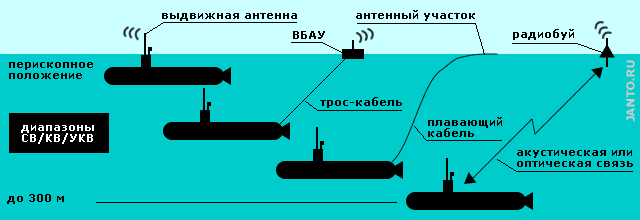
Рис.1.2. Схемы радиообмена с подводной лодкой в диапазонах СВ, КВ и УКВ.
Особо следует отметить, что в связи с указанными выше ограничениями радиообмен в диапазонах СВ/КВ/УКВ как в режиме передачи, так и в режиме приема не может вестись непрерывно и носит сеансовый характер, поскольку перед началом радиообмена лодка должна провести определенные маневры и выпустить антенные устройства, а по окончании сеанса убрать их с поверхности и вернуться на прежнюю глубину и курс. Этот фактор серьезно ограничивает оперативность взаимодействия подводных лодок с вышестоящим командованием, а также с другими подвижными объектами и береговыми службами.
Кроме того, радиус устойчивой связи в диапазонах СВ и КВ ограничен и зависит от параметров распространения радиоволн, определяемых текущим состоянием ионосферы. Поэтому для обеспечения стабильного покрытия больших акваторий требуется создание территориально распределенных сетей передающих и приемных станций. В диапазоне УКВ радиус устойчивой связи ограничен зоной прямой видимости, поэтому покрытия больших акваторий возможно только с использованием флотилий спутников связи, объединяемых в единую сеть.
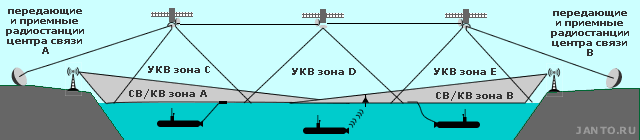
Рис.1.3. Схема организации зон покрытия для связи с подводными лодками в диапазонах СВ, КВ и УКВ.
1.3. ДИАПАЗОН VLF
Ограничения в диапазонах СВ/КВ/УКВ, которые накладывает требование скрытности, привели к необходимости использовании диапазонов, пригодных для связи с размещением антенн под водой. Способность радиоволн проникать под воду начинает проявляться с нижнего участка длинноволнового диапазона. Однако глубина проникновения при этом незначительна — всего 1-2 метра. На несколько большую глубину — до 10-30 метров проникают радиоволны диапазона VLF, относящиеся к сверхдлинным. Именно данный диапазон по соотношению затраты — выгоды наиболее востребован для связи с подводными лодками, находящимися в состоянии погружения без выноса антенн на поверхность. При этом используются, в основном, частоты от 14 до 30 кГц, что соответствует длинам волн от 10 до 21 км, а в ряде стран, в т.ч. в США и в странах НАТО, «прихватывается» также и нижняя область динноволнового диапазона (LF/ДВ) до 60 кГц, т.е. радиоволны длиной от 5 км. Такой комбинированный диапазон часто обозначается как VLF/LF.
Для передающих антенн диапазонов VLF и LF требуются мачты высотой 200-300 метров, размещаемые на площади в несколько квадратных километров, а требуемая мощность передатчиков для покрытия зон радиусом 5 — 10 тысяч километров составляет до 1 и более мегаватт. По этой причине разместить на борту подводной лодки передающий тракт невозможно, в силу чего этот диапазон, как и все более низкочастотные, пригоден только для односторонней передачи сообщений подводным лодкам с надводных передающих центров. Пропускная способность каналоы в диапазоне VLF/LF существенн ниже, чем в диапазонах СВ/КВ/УКВ, но она достаточная для передачи на подводную лодку команд и данных целеуказания.
В качестве приемных антенн в этом диапазоне часто используются рамочные магнитные антенны. Для приема на глубинах до 10-30 м такая антенна может размещаться на подводной лодке. Для приема при движении на бОльших глубинах используется ВБАУ т.н. параванного типа, которое за счет положительной плавучести и гидродинамических сил, создаваемых рулями, движется в приповерхностном слое на глубине нескольких метров, оставаясь незаметным для средств обнаружения. Оно обеспечивает устойчивый прием сигнала при погружении лодки на глубину до 100-150 м (а некоторые модели и более) как на стопе, так и при движении со скоростью до 18-20 узлов, и может использоваться для размещения в них дополнительно антенн диапазонов СВ/КВ/УКВ, активируемых при подъеме ВБАУ на поверхность.
Более совершенными по сравнению с ВБАУ параванного типа являются буксируемые антенные устройства в виде длинного плавающего кабеля, которые при необходимости могут совмещаться с такого же типа кабельными антеннами диапазонов ELF (см. ниже), а также оснащаться антеннами диапазонов СВ/КВ/УКВ, размещаемыми во всплывающем на поверхность конце кабеля.
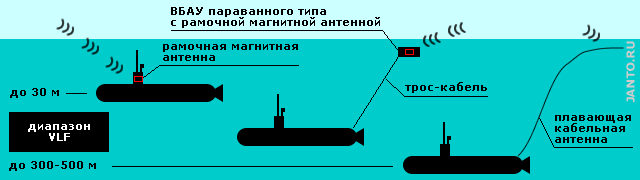
Рис.1.4. Схемы радиообмена с подводной лодкой в диапазоне VLF.

Рис.1.5. Схема организации зон покрытия для связи с подводными лодками в диапазоне VLF.
Максимальная дальность распространения волн в этом диапазоне в среднем для станций мощностью 800 — 1000 кВт составляет 5-10 тысяч км, а для станций повышенной мощности 2-4 МВт — до 15 тысяч км, поэтому для обеспечения покрытия всей акватории мирового океана так же, как и в рассмотренных выше высокочастотных диапазонах, необходима сеть передающих станций. Кроме того, для дополнительного расширения зоны покрытия, а также для резервирования стационарных передающих комплексов в случае их вывода из строя противником, могут использоваться мобильные передающие комплексы, в частности, специальные самолеты — ретрансляторы типа TACAMO или ТУ-142МР.
1.4. ДИАПАЗОН ELF
Радиоволны диапазонов ELF/СНЧ и ELF/КНЧ за счет намного более низкой частоты существенно меньше, чем радиоволны диапазона VLF, поглощаются землей, ионосферой и водой, что позволяет им огибать весь земной шар почти без затухания, а также проникать под воду на глубины до 100-300 и более метров. Эти возможности позволяют обеспечить постоянную безсеансовую одностороннюю связь с подводными лодками, находящимися на больших глубинах в любой точке акватории мирового океана, причем без неоходимости выполнения ими маневров и операций, связанных с доставкой к поверхности антенных устройств, и при использовании при этом единственного передающего центра.
Опираясь на эти возможности, в СССР и США в 80-е годы были построены передающие комплексы ЗЕВС и SeaFarer/ELF, работающие в диапазоне ELF/СНЧ на частотах 82 и 76 Гц соответственно (длина волны немногим менее 4000 км), эксплуатаци которых подтвердила возможность реализации глобальных глубоководных каналов связи с подводныи лодками.

Рис.1.6. Схемы радиообмена с подводной лодкой в диапазоне ELF/СНЧ.
Однако пропускная способность каналов связи в диапазоне ELF/СНЧ существенно ниже, чем в диапазоне VLF, за счет на два порядка более низкой частоты, поэтому он позволяет обеспечить только передачу очень коротких команд и оповещений из заранее заданного перечня, в т.ч. команд для активации упомянутых выше более широкополосных каналов с выходом на связь для получения подробных инструкций. Надо также отметить, что в связи с ростом глубин погружения подводных лодок до 300 — 500 и более метров возможности этого диапазона и в этой ограниченной части оказались фактически исчерпаны.
С середины нулевых годов активность комплекса SeaFarer/ELF на частоте 76 Гц не отмечается, а активность комплекса ЗЕВС на частоте 82 Гц существенно снизилась, зато отмечается его активность на более низких частотах, включая диапазон крайне низких частот ELF/КНЧ, в т.ч., по данным целого ряда публикаций, в интересах геофизических исследований стратегического значения.
В то же время, по данным ряда публикаций радиопередающий комплекс диапазона ELF был построен в 2015 году в Индии, однако эта информация требует проверки. Кроме того, по спутниковым снимкам в последние годы прослеживается строительство в границах КНР масштабных территориально распределенных сооружений, идентифицируемых некоторыми обозревателями как приемо-передающие комплексы для глобальной глубоководной связи с подводными лодками. Данная информация также требует оценки.
1.5. ОСОБЕННОСТИ ВЕРХНИХ УРОВНЕЙ
Рассмотренные выше вопросы, связанные с взаимозависимостью между использованием тех или иных диапазонов, пропускной способностью каналов связи, направлениями приема и передачи, с одной тороны, и с глубиной погружения подводной лодки и ее антенны с другой стороны, относятся к нижнему физическому уровню каналов связи, на котором, как на фундаменте, строятся конкретные технические решения, связанные с реализацией антенн, приемников, передатчиков, периферии и т.д., а также архитектурные решения по организациии информационного взаимодействия подводных лодок с другими объектами на канальном, сетевом, прикладном и прочих уровнях, в т.ч. способы и параметры модуляции, диаграммы канального и сетевого обмена, алгоритмы кодирования и шифрование информации, формы представления данных и их информационное содержание и т.д.
Проблематика, связанная с этими аспектами реализации каналов связи с подводными лодками, зависит не только от диапазонов частот и глубины размещения антенн, но и от многих других факторов. Например, пропускная способность каналов связи в диапазонах VLF и ELF ограничена не только низкой частотой несущей, но и помеховой обстановкой, влиянием параметров ионосферы на фазовые сдвиги при распространении радиоволн, ограничениями, накладываемыми допустимыми режимами силовых элементов сверхмощных передатчиков на виды и параметры модуляции, отсутствием возможности квитирования приема, что требует введения информационной избыточности, и т.д. В диапазонах СВ/ДВ/УКВ главным проблемообразующим фактором является потребность в увеличении объемов и скоростей приема-передачи цифровых данных в региональных и глобальных радиосетях при повышении требований к скрытности, в связи с чем главной тенденцией является использование спутниковых УКВ каналов, в т.ч. освоение все более высоких частот, дрейфуя в диапазон сантиметровых волн.
Рассмотрение проблематики верхних уровней каналов связи выходит за рамки задач настоящей главы. Детально она будет рассмотрена при описании систем и технических средств связи конкретных диапазонов, а в панорамном систематизированном виде с «раскладкой по полочкам» обобщена в отдельной главе данной части настоящего обзора.
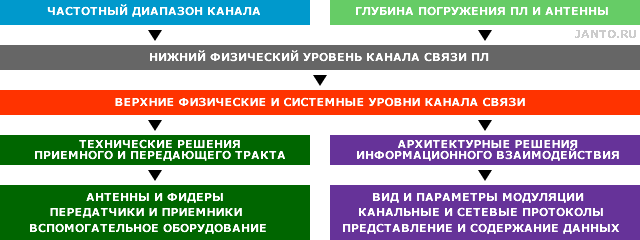
Рис.1.7. Уровни проблематики каналов связи с подводными лодками
1.6. ИНТЕГРАЦИЯ КАНАЛОВ
Как видно из приведенного в настоящей главе краткого обзора особенностей каналов связи с подводными лодками, основные задачи — обеспечение скрытности подводной лодки при радиообмене, высокой пропускной способности каналов и постоянной безсеансовой связи на всех глубинах и скоростях хода являются принципиально несовместимыми. Это предопределяет необходимость использования в составе единой системы связи различных каналов с различными характеристиками с интеграцией их на всех уровнях — от уровня радиорубки подводной лодки до уровня центров связи тактического и стратегического командования. Базовые принципы интеграции каналов будут рассмотрены отдельно, в т.ч. на примерах интегрированных систем связи подводных флотов ведущих военно-морских держав.
Продолжение следует, следите за обновлениями!
Источник



